К машинам и механизмам
Общие сведения о машинах и механизмах
По назначению машины условно подразделяют на три группы:
1. Энергетические машины, в них какой-либо вид энергии
(электрической, тепловой и т.п.) преобразуется в механическую работу и наоборот. Относятся:
— машины-двигатели (электродвигатели, тепловые и ядерные двигатели и т.п.);
— машины-преобразователи (компрессоры, электрические генераторы и др.).
2. Технологические или рабочие машины предназначены для
выполнения производственных процессов по изменению формы, свойств и положения объектов труда (например, металлорежущие и ткацкие станки, полиграфические, швейные, горнодобывающие, транспортные и другие машины, роботы и т.п.).
3. Информационные (контрольно-управляющие) машины, в которых происходит преобразование вводимой информации для контроля, регулирования и управления технологическими процессами (вычислительные, кибернетические машины и др.).
Являясь носителем этих движений, механизм представляет собой совокупность (систему) взаимосвязанных тел, предназначенных для преобразования движения одного или нескольких тел в требуемые движения других тел.
Механизм осуществляет: передачу энергии (движения), как правило, с преобразованием сил и характеристик закона движения от источника, например двигателя, к одному или нескольким рабочим органам машины; преобразование и регулирование механического движения; заданную компоновку машины.
Если в преобразовании движения участвуют как твердые, так и жидкие или газообразные тела, то механизм называется соответственно гидравлическим или пневматическим.
Основные характеристики и требования, предъявляемые
к машинам и механизмам
Основными характеристиками машин являются: назначение и область применения, способ управления, мощность и производительность, коэффициент полезного действия, масса, габаритные размеры, стоимость и др.
Основные характеристики машин указывают в их техническом паспорте.
К машинам и механизмам предъявляют следующие основные требования:
2.Надежности.Надежность – свойство изделия выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах, соответствующих заданным режимам в условиях использования, технического обслуживания, ремонта, хранения и транспортирования.
Надежность изделия зависит от необходимой наработки, которая может исчисляться в часах работы станка, налета самолета и т.д., в километрах пробега автомобиля, гектарах обработанной земли для сельскохозяйственной машины и т. д. Надежность зависит от всех этапов создания и эксплуатации изделий. Ошибки проектирования, погрешности в производстве, упаковке, транспортировке и эксплуатации изделия сказываются на его надежности.
3.Технологичности.Технологичными называют машины, требующие минимальных затрат средств, времени и труда в производстве, эксплуатации и ремонте.
Конструкции машин должны характеризоваться высокой преемственностью и высоким уровнем стандартизации и унификации конструкционных элементов, материалов, расчетов и технологий, возможностью «сращивания» систем автоматизированного проектирования и производства и др.
4.Экономичности. Коэффициент полезного действия является характеристикой экономичности машин. Он показывает долю полезно реализуемой энергии и эффективность ее использования. При оценке экономичности учитывают затраты на проектирование, изготовление, эксплуатацию и ремонт.
Экономичность машин достигается за счет снижения материалоемкости, энергоемкости и трудоемкости производства, за счет максимального коэффициента полезного действия в эксплуатации при высокой надежности; высокой специализацией производства и т. д.
5.Эргономичности.Совершенство и красота внешних форм машины и удобство обслуживания существенно влияют на отношение к ней со стороны обслуживающего персонала.
6. Экологичности. Существенное значение имеет влияние машин на окружающую среду.
ДЕТАЛИ МАШИН Лекция 1. Введение  4521
4521
 4521
45211. Понятие машины, механизма и их классификация. Современное производство не возможно без использования машин и механизмов. Машиной называется устройство для преобразования энергии и (или) движения, накопления и переработки информации.
Механизмом называется часть машины, в которой рабочий процесс выполняется посредством механических движений. Механизм представляет собой систему взаимосвязанных тел, предназначенных для преобразования одного движения в другое.
По назначению машины условно подразделяют на 3 группы.
А) Энергетические машины, в которых какой-либо вид энергии преобразуется в механическую работу или наоборот. Среди этих машин выделяют машины – двигатели (электродвигатели, тепловые и ядерные двигатели) и машины – преобразователи (компрессоры, электрические генераторы и др.).
Б) Технологические или рабочие машины, предназначенные для выполнения производственных процессов по изменению формы, свойств или положения объектов труда ( металлорежущие станки, швейные, горнодобывающие и др. машины).
В) Информационные или контрольно-управляющие машины, в которых происходит преобразование вводимой информации для контроля, регулирования и управления технологическими процессами.
В зависимости от способа управления различают машины ручного управления (на встроенном рабочем месте или дистанционно), полуавтоматического и автоматического действия. Машина, в которой преобразование энергии, материалов или информации происходит без непосредственного участия человека, называется машиной – автоматом. Совокупность машин-автоматов, соединенных между собой транспортными устройствами и предназначенных для исполнения определенного технологического процесса, образуют автоматическую линию.
Основными характеристиками машин являются: назначение и область применения, способ управления, мощность и производительность, КПД, масса, габаритные размеры, стоимость и др. Эти характеристика указываются в паспорте машины.
Все машины, механизмы, приборы, аппараты, приспособления изготавливают из деталей. Деталью называется элемент конструкции, изготовленный из материала одной марки без применения сборочных операций (болт, гайка, шестерня, вал и др.). Совокупность деталей, соединенных сборочными операциями (завинчиванием, сваркой, заклепками и т.п.) и предназначенных для совместной работы, называют сборочной единицей.
В нашем курсе деталей машин мы ознакомимся с типовыми механизмами, их устройством, расчетом и правилами конструирования.
2. Общая классификация деталей машин.Всё многообразие деталей машин принято классифицировать на следующие группы.
1. Г р у п п а с о е д и н е н и й. Многие детали после их изготовления могут быть соединены между собой постоянно без последующей разборки. Например, нет необходимости разбирать паровой котёл на отдельные листы.

Другим распространённым видом соединений деталей машин являются разъёмные соединения. К ним относятся резьбовые, шпоночные, клиновые, штифтовые и др.
2. П е р е д а т о ч н ы е м е х а н и з м ы предназначены для передачи механической энергии и преобразования параметров механического движения от машины – двигателя к технологической машине, выполняющей определённые операции. В состав передаточных механизмов, как правило, входят собственно передачи, валы и муфты.
Наиболее распространены передачи вращательного движения. Они являются механизмами, предназначенными передавать энергию от одного вала к другому с изменением угловых скоростей и вращающих моментов. Различают передачи трением и передачи зацеплением. Первые передают энергию посредством сил трения. Разновидностями таких передач являются ремённые и фрикционные передачи. В передачах зацеплением движение передается посредством последовательно зацепляющихся элементов – зубьев. Среди этих передач различают зубчатые, червячные и цепные.
4. М у ф т ы – служат для соединения или разъединения валов.
5. П о д ш и п н и к и – служат опорами для валов и осей.
6. Н а п р а в л я ю щ и е п о с т у п а т е л ь н о г о д в и ж е н и я служат для поддержания поступательно движущихся деталей (например, суппорт токарного станка движется по направляющим поступательного движения).
7. К о р п у с н ы е д е т а л и и с т а н и н ы предназначены для поддержания (базирования) подшипников и направляющих.
9. М а х о в и к и, м а я т н и к и, г р у з ы, б а б ы и ш а б о т ы служат для повышения равномерности движения, уравновешивания механизмов или накопления энергии за счет своей массы.
10. У с т р о й с т в а з а щ и т ы и с м а з ы в а н и я служат для увеличения долговечности машин.
11. Д е т а л и и м е х а н и з м ы управления.
Наконец, выделяют специфические детали отдельных групп машин:
– для энергетических машин: цилиндры, поршни, клапаны, лопатки и диски турбомашин, роторы и статоры электрических машин и др.
– для транспортных машин: колёса, гусеницы, рельсы, винты водяные и воздушные, ковши, грейферы и т.п.
– для машин – орудий: опоки, валки, шаботы, бабы, патроны, лемеха, катушки, челноки и др.
3. Основы проектирования механизмов, стадии разработки.Конструирование машин – серьёзный, творческий процесс, который включает следующие этапы:
1) техническое задание на проект или техническое предложение; техническое задание составляют, как правило, на машину для массового или серийного выпуска, а техническое задание – для завода-изготовителя специальных машин; в этих документах определяются основные паспортные параметры машины и излагаются общие принципиальные вопросы схемы будущей машины;
2) эскизный проект представляет собой эскизную проработку общих видов основных узлов машины;
3) технический проект содержит общие виды машины и её узлов, позволяющие перейти к деталировке;
4) рабочий проект, представляющий собой комплекс общих видов, рабочих чертежей деталей, спецификаций и других документов, достаточных для изготовления машины.
При конструировании должны быть выбраны оптимальные параметры
изделия, наилучшим образом удовлетворяющие многочисленным требованиям. При этом основными критериями являются:
Основными требованиями к современным машинам являются: работоспособность, надежность, технологичность, экономичность, эргономичность.
Работоспособность это свойство машины выполнять заданные функции с параметрами, установленными нормативно-технической документацией.
Надежность – свойство изделия выполнять заданные функции без сбоев и отказов в работе.
Технологичность – это легкость изготовления, под которой понимается минимум труда, времени, средств и других затрат на изготовление машины.
Экономичность предполагает минимум затрат на проектирование, изготовление, эксплуатацию и ремонт изделия.
Эргономичность – это отсутствие вредного влияния машины на организм человека, красота и совершенство форм, именуемые дизайном.
Удовлетворить одновременно всем перечисленным критериям весьма непросто. Поэтому лучших результатов достигают многовариантностью конструирования. Оптимальным в общем случае признаётся вариант, который обеспечивает нужные показатели работы при минимальных затратах общественного труда. При этом привлекаются теоретические расчёты, конструкторский и технологический опыт, а также эксперименты.
4. Требования к деталям, критерии работоспособности и влияющие на них факторы. Как и в случае машины, основными требованиями к деталям машин являются работоспособность и надёжность. Чтобы удовлетворить этим критериям конструктор имеет возможность распорядиться формой, размерами и материалом детали. При выборе формы детали конструктор зачастую работает совместно с дизайнером, а размеры и материал детали определяются расчётом.[1]
Работоспособность и надёжность деталей машин характеризуется следующими критериями: прочность, жесткость, износостойкость, теплостойкость, виброустойчивость. С понятиями прочность и жесткость мы с вами уже познакомились в курсе сопротивления материалов и будем ещё продолжать знакомиться. В частности, мы пока не рассмотрели случаев переменных во времени напряжений, а также явлений потери устойчивости элементов конструкций.
Чаще всего детали выходят из строя вследствие износа. Физически износ представляет собой процесс разрушения и отделения частиц материала с поверхности твёрдого тела. При этом процесс сопровождается также накоплением остаточных деформаций, вызванных трением в кинематических парах. Следствием процесса является изменение размеров и (или) формы детали.
Износ ограничивает долговечность деталей по следующим причинам:
а) потеря требуемой точности (приборы, измерительный инструмент, станки);
б) снижение КПД, потеря мощности или производительности (двигатели, насосы и др.);
в) снижение прочности вследствие уменьшения сечений, неравномерного износа опор, увеличения динамических нагрузок;
г) возрастание шума;
д) полное истирание (рабочие органы землеройных машин и т.п.).
Виды изнашивания подразделяют на следующие группы.
2. Молекулярно-механическое изнашивание, вызываемое схватыванием материалов трущихся поверхностей под действием молекулярных сил. Оно наблюдается при малых скоростях скольжения и больших силах в кинематической паре, вызывающих выдавливание масляной плёнки. При высоких скоростях схватывание может наступить из-за нагрева, ведущего к снижению вязкости смазки.
3. Коррозионно-механическое изнашивание сопровождается химическим или электролитическим взаимодействием материала детали со средой. Разновидностью такого изнашивания является т.н. фреттинг-коррозия, проявляющаяся в разрушении постоянно контактирующих поверхностей в условиях касательных микросмещений без удаления продуктов износа. Такого рода изнашивание характерно для посадочных поверхностей колец подшипников качения и в шлицевых соединениях.
Другой разновидностью коррозионно-механического изнашивания является водородный износ, связанный с выделением водорода при разложении воды, нефти и нефтепродуктов.
Расчет на износостойкость состоит в обеспечении необходимой толщины масляного слоя между трущимися поверхностями или, в необходимых случаях, ограничении давлений в кинематических парах. При этом используют результаты опытов и теорию подобия. В качестве исходной для характеристики износостойкости принимают следующую зависимость:

где р – давление (контактное напряжение), S – путь трения. Показатель т устанавливают по результатам испытаний (тÎ [1…3]).
Классификация машин.
Современное производство немыслимо без всевозможных высокоэффективных машин- устройств для преобразования энергии, движения, накопления и переработки информации.
Благодаря их использованию повышается производительность труда, облегчается физический и умственный труд человека и т. д.
По назначению машины условно подразделяются на три группы.
1.Энергетические машины, в которых какой-либо вид энергии ( тепловой, электрической и т.п.) преобразуется в механическую работу и наоборот. К этой группе относятся как машины двигатели (электродвигатели, тепловые и ядерные двигатели и т.п.), так и машины преобразователи ( компрессоры. электрические генераторы и др.).
2. Технологические или исполнительные машины, предназначенные для выполнения производственных процессов по изменению формы, свойств и положения объектов труда ( металлорежущие и ткацкие станки, полиграфические, швейные, горнодобывающие, транспортные и другие машины, роботы и т.п.).
3. Информационные машины, в которых происходит преобразование вводимой информации для контроля, регулирования и управления технологическими процессами.
Механизмы и их назначение.
Механизм-это часть машины, в которой рабочий процесс реализуется путём выполнения определённых механических движений.
Механизм – представляет собой систему подвижно связанных между собой материальных тел, предназначенных для преобразования движения и преодоления сил с помощью двигателя.
Механизм состоит из звеньев.
Два звена, подвижно связанных между собой, образуют кинематическуюпару.
ВИДЫ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ КИНЕМАТИЧЕСКИХ ПАР
По виду относительного движения звеньев кинематические пары делятся на плоские и пространственные.
По характеру контакта звеньев кинематические пары делятся на высшие и низшие. В высшей кинематической паре контакт звеньев происходит по линии или в точке. Одно звено относительно другого имеет возможность перекатываться и скользить. В низшей кинематической паре звенья касаются по поверхности (плоскость, цилиндрическая поверхность, сфера, винтовая поверхность).
В относительном движении звеньев при этом возможно лишь скольжение.
Ниже даны примеры наиболее распространённых кинематических пар, варианты их условных изображений на схемах.
Одноподвижные кинематические пары (Н = 1)
а) плоская, низшая, вращательная пара (плоский шарнир) –рис.1.1.
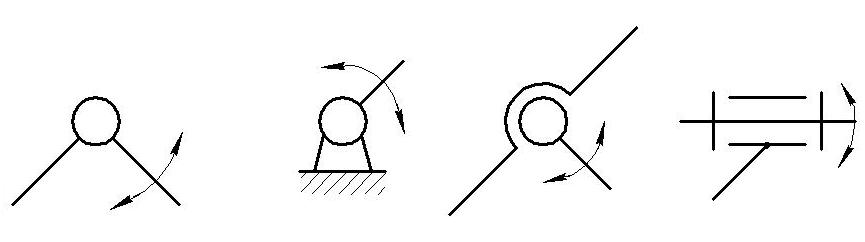
б) плоская, низшая, поступательная пара (рис.1.2).
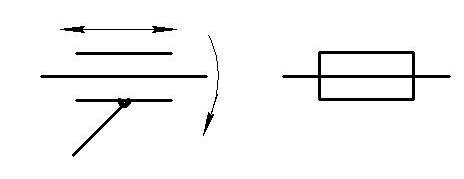
в) пространственная, низшая винтовая кинематическая пара (рис.1.3)
В данной паре (винт-гайка) вращательное и поступательное движения одного из звеньев связаны между собой.
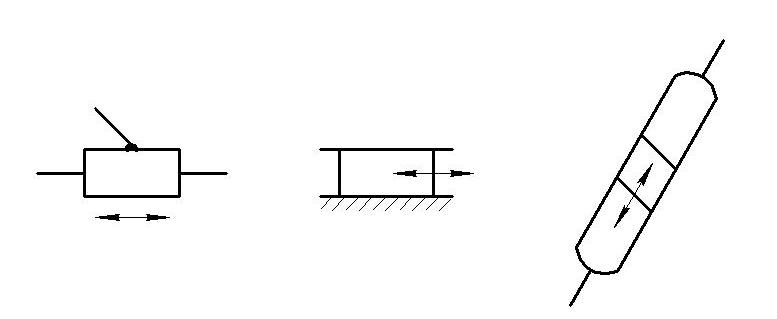
Двухподвижные кинематические пары (Н = 2)
а) плоская высшая кулачковая кинематическая пара (рис.1.4)
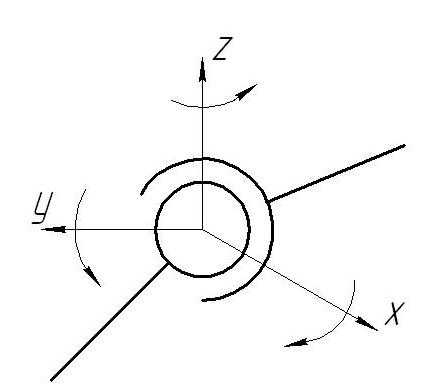
б) пространственная низшая кинематическая пара –цилиндрический шарнир (рис.1.5)
Трёхподвижные кинематические пары (Н = 3)
 шарнир ( рис.1.6)
шарнир ( рис.1.6)
б) пространственная высшая кинематическая пара (образуется при касании по линии двух цилиндрических поверхностей) –рис.1.7
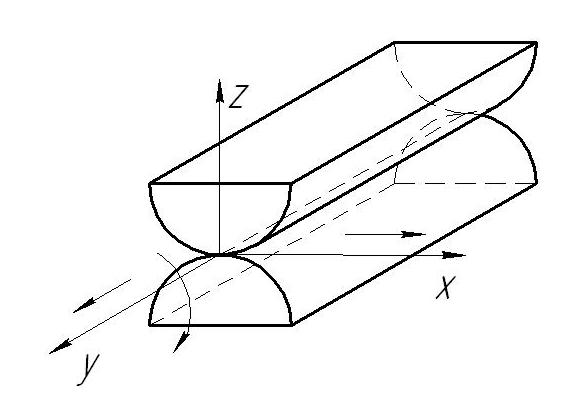 Рис.1.7
Рис.1.7
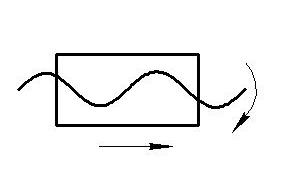
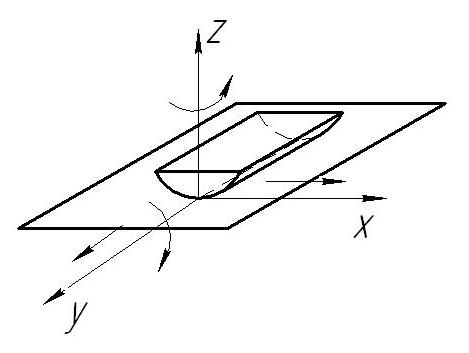
Пространственная высшая четырёхподвижная кинематическая пара ( Н=4)
Данная пара образуется при касании по линии цилиндрической поверхности и плоскости (рис.1.8).
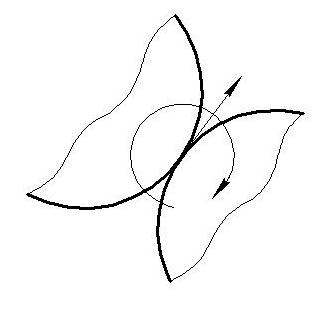
Пространственная высшая пятиподвижная кинематическая пара (Н = 5)
Данная кинематическая пара образуется при точечном контакте двух сфер или сферы и плоскости (рис.1.9).
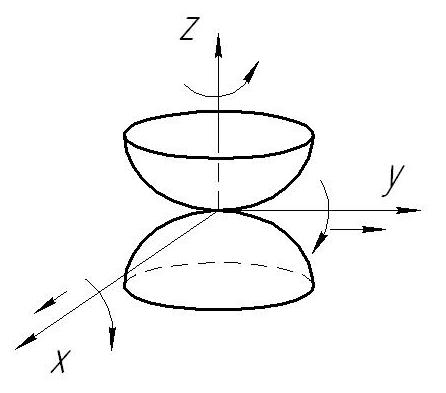 Рис.1.9
Рис.1.9
КИНЕМАТИЧЕСКИЕ ЦЕПИ, ОБРАЗОВАНИЕ МЕХАНИЗМА
Система звеньев, соединённых с помощью кинематических пар, называется кинематической цепью.
В зависимости от строения различают открытые и замкнутые цепи. В открытой цепи имеются звенья, входящие лишь в одну кинематическую пару (рис.1.10, а ). В замкнутой цепи (рис.1.10, б) каждое звено входит не менее чем в две кинематические пары.
Механизм можно получить из кинематической цепи, если о 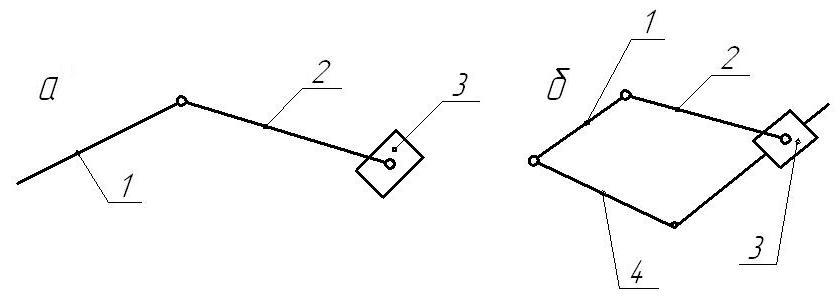 дно из звеньев сделать неподвижным относительно всех других звеньев, входящих в состав данной цепи. Это звено называют стойкой (корпус, станина, рама).
дно из звеньев сделать неподвижным относительно всех других звеньев, входящих в состав данной цепи. Это звено называют стойкой (корпус, станина, рама).
В механизме имеются входные и выходные звенья. Входному звену сообщается движение от двигателя. Выходное звено реализует движение, для которого предназначен механизм.
Механизмы могут иметь несколько входных или выходных звеньев. Например, дифференциал автомобиля при одном входном звене, получающем движение от двигателя, имеет два выходных звена, приводящих в движение колёса.
ОСНОВНЫЕ ВИДЫ МЕХАНИЗМОВ
По геометрическим и конструктивным признакам механизмы можно разделить на следующие группы:
2.Механизмы с гибкими связями (ременные и цепные передачи).
3.Механизмы с упругими звеньями, деформация которых влияет на движение механизма.
4.Механизмы с остановками выходного звена (храповой механизм).
7.Механизмы с электромагнитными и электронными элементами.
В данном курсе рассматриваются только жесткозвенные механизмы, в которых размеры звеньев в процессе работы не меняются ( если не учитывать упругие деформации).
Исходя из кинематических, конструктивных и функциональных свойств их подразделяют на рычажные, кулачковые, фрикционные, зубчатые и винтовые.
Эти механизмы образованы соединением звеньев с помощью вращательных (рис.11) и поступательных (рис.12) низших кинематических пар.
Далее приводятся схемы наиболее распространённых плоских рычажных четырёхзвенных механизмов. Более сложные механизмы могут быть получены путём присоединения к ним групп звеньев с помощью кинематических пар.
Этот механизм может быть образован из замкнутой кинематической цепи (рис.1.10, б), если сделать неподвижным звено 4.
За наиболее часто применяемыми звеньями закреплены специальные названия:
1- кривошип, совершает вращательное движение;
2- шатун, совершает сложно-плоское движение, не имеет неподвижных точек. Он передаёт движение от входных (ведущих) звеньев к выходным (ведомым).
3- ползун, совершает возвратно-поступательное движение в неподвижных направляющих стойки 4.
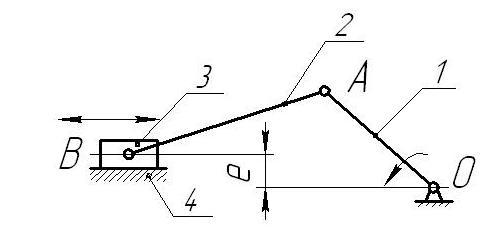
Расстояние е называется эксцентриситетом. В частном случае, когда е=0,механизм называется центральным.
Эта схема наиболее распространена, так как используется в двигателях внутреннего сгорания.
При вычерчивании схемы механизма необходимо обеспечить возможность проворачивания кривошипа. Для этого должно быть выполнено условие: АВ > (ОА + е). С целью улучшения условий передачи сил длину шатуна назначают в 3-4 раза больше (ОА + е).
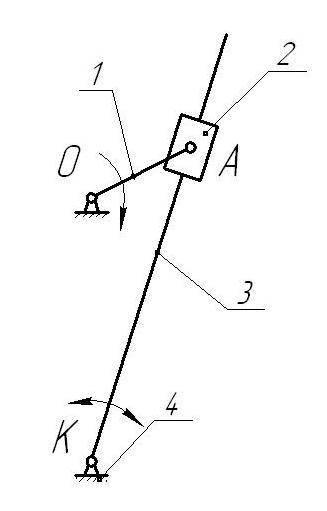
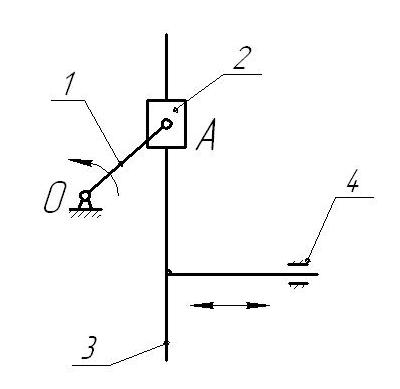
Механизм может быть образован из замкнутой кинематической цепи (рис.1.10, б), если сделать неподвижным звено 1 (рис.2.2).
Звено 3 в таком механизме называется кулисой. Она образует низшую поступательную кинематическую пару со звеном 2, которое, в данном случае, называется кулисным камнем.
Если ОА ОК-вращательное.
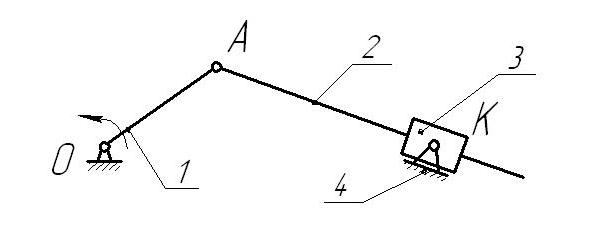
Если в кинематической цепи (рис.1.10, б) неподвижным сделать звено 2, то получается другой вариант (рис.2.4) кулисного механизма с качающейся кулисой 3.
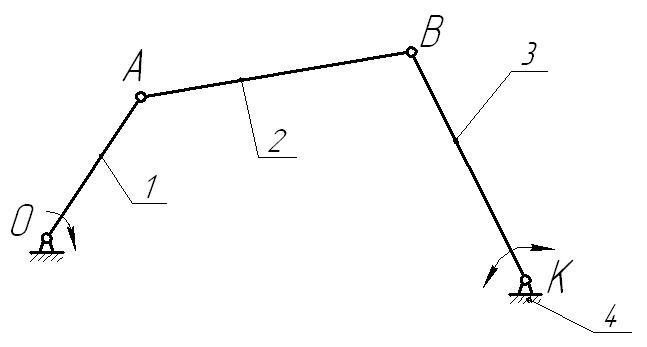
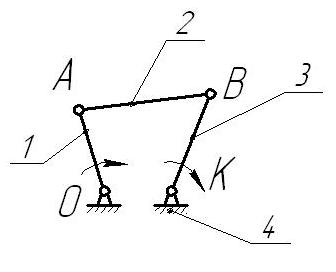
МЕХАНИЗМ ШАРНИРНОГО ЧЕТЫРЁХЗВЕННИКА
Этот механизм образуется с использованием только низших вращательных кинематических пар. Выходное звено ВК в таком механизме может качаться или вращаться (в зависимости от выбранных размеров звеньев). В первом случае (рис.2.5) выходное звено 3 называется коромыслом. Во втором случае (рис.2.6) выходное звено также кривошип, а механизм называется двухкривошипным.
 1-кривошип
1-кривошип
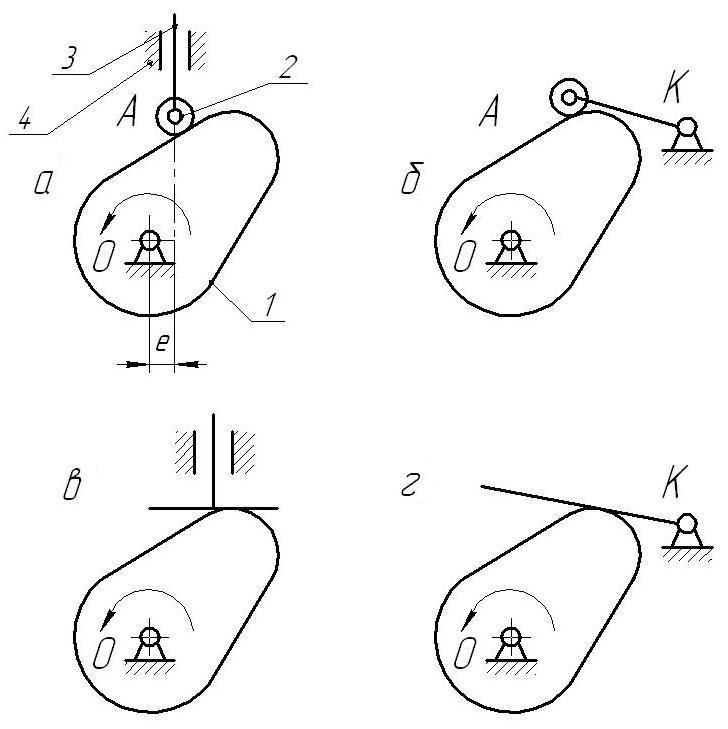
На рис.2.7 представлены наиболее часто применяемые схемы плоских кулачковых механизмов. Входным (ведущим) звеном является вращающийся кулачок 1. Ведомое звено называется толкателем 3. Для уменьшения потерь на трение в конструкциях кулачковых механизмов часто предусматривают
ролик 2, образующий вращательную пару с толкателем.
В названии кулачкового механизма указывается вид движения толкателя и вид его рабочей поверхности.
На рис.2.7, а представлена схема кулачкового механизма с поступательным роликовым толкателем. В этом механизме ось вращения кулачка и линия перемещения центра ролика в общем случае смещены относительно друг друга. Расстояние емежду ними называется эксцентриситетом. В частном случае, когда е= 0, механизм называют центральным кулачковым механизмом с поступательным роликовым толкателем.
Механизм на рис.2.7, б называется кулачковым механизмом с качающимся роликовым толкателем.
На рисунках 27, в и 2.7, г представлены механизмы с плоским толкателем: кулачковый механизм с поступательным плоским толкателем и механизм с качающимся плоским толкателем.
 ФРИКЦИОННЫЕ МЕХАНИЗМЫ
ФРИКЦИОННЫЕ МЕХАНИЗМЫ
В этих механизмах движение от входного звена к выходному передаётся за счёт сил трения, возникающих в результате контакта этих звеньев.
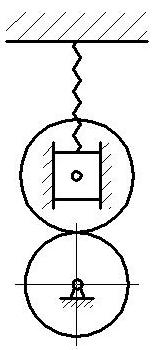
Простейшая фрикционная передача показана на рис.2.8. Она состоит из двух цилиндрических катков и стойки. Один каток прижимается к другому силой упругости пружины.
В технике различают трёхзвенные зубчатые передачи, многоступенчатые передачи и планетарные передачи. Трёхзвенная передача состоит из двух зубчатых колёс и стойки.
Передача, в которой угловая скорость ведомого звена меньше, чем угловая скорость ведущего звена, называется понижающей передачей (редуктор). Если в зубчатой передаче происходит увеличение угловой скорости ведомого звена, передача называется повышающей (мультипликатор).
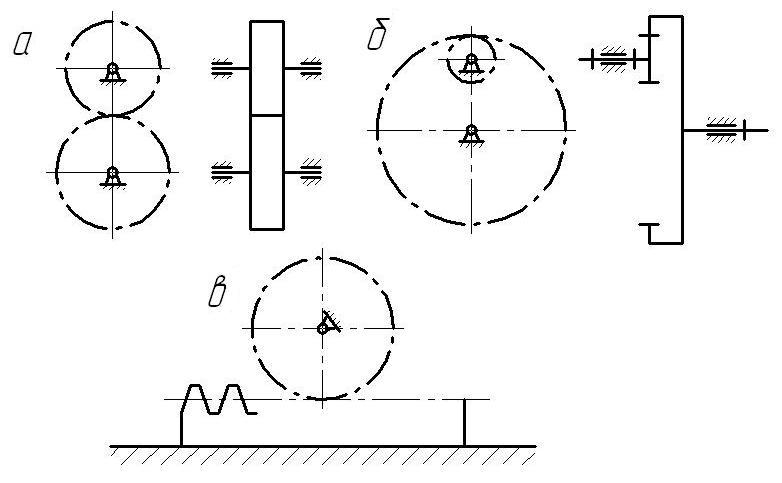
На рис.2.9 приводятся условные изображения трёхзвенной цилиндрической зубчатой передачи внешнего зацепления (рис.2.9, а), цилиндрической передачи внутреннего зацепления (рис.2.9, б) и реечной зубчатой передачи (рис.2.9,в ).
На условных изображениях плоских и пространственных зубчатых пар колёса на виде с торца изображают штрихпунктирными линиями. Зубья изображают только на зубчатой рейке. На виде сбоку зубчатые колёса изображают сплошными линиями.
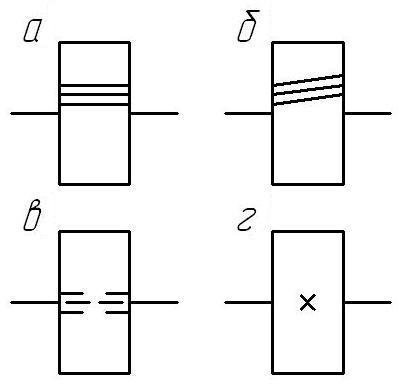
В некоторых случаях на кинематической схеме требуется различать прямозубые и косозубые колёса. Соответствующие условные обозначения представлены на рис.2.10, а и 2.10, б.
Для различения колёс, вращающихся на оси и закреплённых на валу, применяют условные обозначения колёс по рис.2.10, в и 2.10, г.
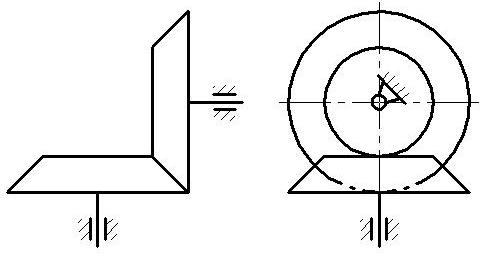
На рис.2.11 показано в двух проекциях условное изображение конической зубчатой передачи, которая передаёт вращение между пересекающимися осями.
На рис.2.12 приводятся условные изображения червячной передачи с цилиндрическим червяком (рис.2.12, а) и винтовой зубчатой передачи (рис.2.12,б).
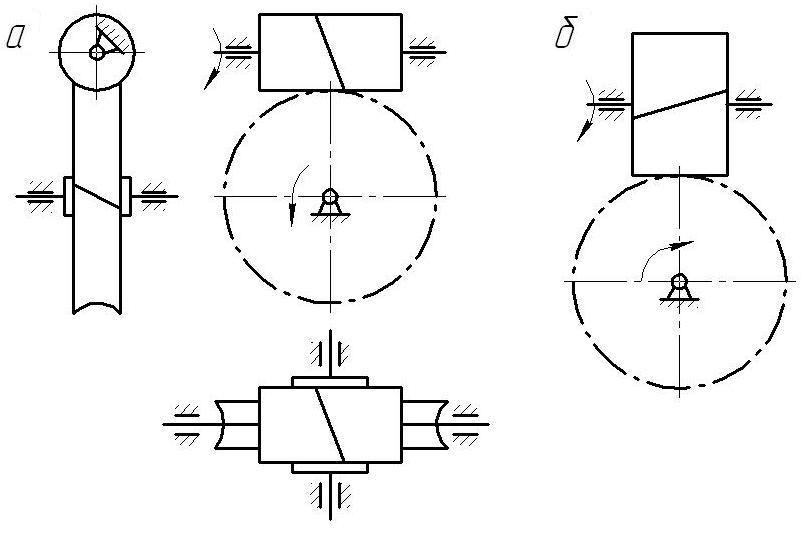
Оси колёс в этих передачах перекрещиваются. Червячная передача применяется для передачи вращения от червяка к червячному колесу в качестве понижающей передачи. При зацеплении зубья червяка и колеса находятся в линейном контакте. Винтовая зубчатая передача состоит из двух косозубых (винтовых) колёс. Ввиду того, что зубья в винтовой передаче касаются в точке, её нагрузочная способность ниже, чем нагрузочная способность червячной передачи.
На кинематических схемах червячных и винтовых передач должно быть задано направление винтовой линии червяка в червячной передаче и направление винтовой линии одного из зубчатых колёс винтовой зубчатой передачи. Различают правые и левые винтовые линии.
Для определения направления винтовой линии следует мысленно перемещаться по образующей цилиндрической заготовке червяка или косозубого колеса, начиная движение от любого из двух его торцов, до встречи с винтовой линией и, рассматривая винтовую линию как препятствие, продолжать движение по винтовой линии. Если при этом потребуется повернуть направо, винтовая линия называется правой, при повороте налево-левой винтовой линией. На кинематических схемах по рис.2.12 червяк и косозубое колесо винтовой передачи представляют собой соответственно правый червяк и левое косозубое колесо.
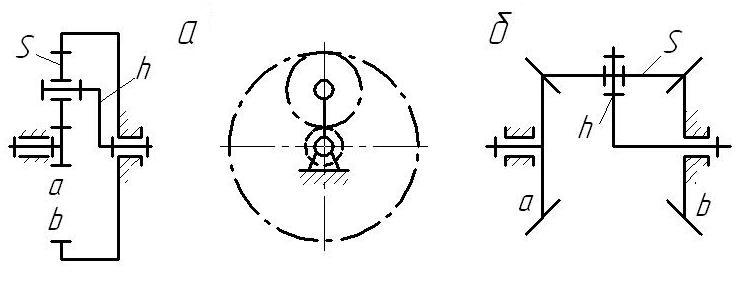
На рис.2.13 представлены условные изображения двух наиболее часто применяемых планетарных механизмов: плоской планетарной передачи (рис.2.13, а) и конической планетарной передачи (рис.2.13, б). Планетарными называются механизмы, которые имеют зубчатые колёса, оси которых вращаются в пространстве. Планетарные механизмы с одной степенью свободы (с одним двигателем) называются планетарными передачами.
Зубчатые колеса а и в планетарных передач называются центральными. Колесо в в рассматриваемых схемах представляет собой неподвижное колесо. Колесо с с подвижной осью вращения называется планетарным (сателлит). Звено h называется водило.
В планетарных механизмах, представленных на рис.2.13, передача движения возможна от колеса а к водилу h и наоборот.
Простейший винтовой механизм (рис.2.14) состоит из винта 1, гайки 2 и стойки 3. Гайка является одновременно ползуном, который перемещается поступательно в неподвижных направляющих. Этот механизм называют также передачей »винт-гайка».



