Основы вхождения в повороты. Часть первая

Любое движение на мотоцикле сопряжено с маневрированием. А маневрирование заключается в уклонении от препятствий и конечно же в поворотах. Опытность мотоциклиста, будь то пилот кольцевых гонок, профессиональный кроссмен/эндурист или первосезонник, со страхом коптящий в крайнем ряду на стареньком скутере или с боем купленном китайце, определяется. нет не дороговизной техники и даже не стажем с момента получения прав, а эффективностью торможения и аккуратностью прохождения поворотов.
Почему важно правильно входить в повороты?

Пренебрежение городских райдеров к базовым техникам управления иногда обескураживает. Многие считают базу элементарной из разряда «это должно быть легко» и не занимаются наработкой опыта, наивно уповая на импровизацию, забывая о том, как теряются люди в экстренных ситуациях. Многие думают, что тренировать нужно только прохождение со свешиванием таза, так называемое «под коленочку», как у настоящих гонщиков профессиональных треков. Но на самом деле, тренировать нужно любое маневрирование и особенно работу в повороте.
В плотном трафике ошибки в момент поворота грозят не просто падением или скользячкой. В городе вы не одни, поэтому ваше падение влияет на всех. Сколько аварий забрали жизни мотоциклистов из-за поворотов, просто страшно. Ситуацию усложняют столкновения после падения. Если вы плохо подобрали траекторию, скорость или нарушили ПДД, то вы автоматически поставили себя под угрозу и получили ситуацию, из которой нужно выходить как можно быстрее. От вашего маневра будут отталкиваться в построении маршрута другие водители. Распространенная беда, когда автомобилисты не замечают или не понимают, куда движется мотоцикл, какое расстояние до него и скорость?
Городской метод поворота — вкатывание

Самый распространенный и верный способ городской езды. Я называю это просто движением по инерции. Смысл метода заключается в том, что коррекция скорости закончилась до вхождения в поворот. Сам маневр вы проходите на постоянной скорости, на закрытом/ровном газу. Вы действительно вкатываетесь в поворот по выбранной заранее траектории. Главная задача — сбросить скорость до соизмеримой геометрии поворота и собственного опыта. Торможение в момент маневрирования приводит к ошибкам и срыву колеса, но если вы опытный мотоциклист, то можете подключить возможности метода TraiL Braking (Trail и Trail Braking на мотоцикле, как это понимать и использовать?).
Ошибки новичков
Скорость и наклон
Если скорость мотоцикла слишком большая, то внутри поворота приходится увеличивать наклон, потому что мотоцикл не успевает повернуть, когда речь идет не о затяжном ровном радиусе дороги, а об остром угле, в который нужно въехать. На большой скорости удобно проходить гладкие длинные дуги, но никак не острые углы, особенно, когда вы пролетели момент входа.
На маленькой скорости мотоцикл просто заваливается под действием силы тяжести. Мы помним, что скорость выравнивает мотоцикл, поднимает его в вертикальное положение. Мотоцикл поворачивает во внутрь. Благодаря заваливанию в наклоне мы поворачиваем. Когда наклон мотоцикла велик, а скорость маленькая, ничего не дает ему возможности удержать баланс и двигаться дальше, вы просто падаете внутрь поворота и катитесь кубарем под свист товарищей и возгласы «это фиаско, брат».
Скорость и наклон мотоцикла всегда идут рядом, по сути это действительно взаимозависимые показатели.

Выравнивание траектории внутри поворота, подруливание
Так получается, когда изначально у вас не было возможности занять нужное положение для поворота, когда вы не смогли во время войти в него или просто ошиблись с построением траектории, всяческие неожиданные помехи на дороге добавляются в этот же список.
Вы начинаете маневрировать в повороте, менять траекторию, искать другое положение. Когда ваш наклон достаточно велик, вы рискуете получить срыв колеса из-за таких телодвижений. Мотоцикл может не успеть сбалансироваться, сцепление покрышки и так крошечное. Чем больше ваша скорость в повороте, тем меньше вы управляете при помощи переднего колеса. На повышенных скоростях лучше подрабатывать телом и наклоном.
Начинающие мотоциклисты забывают, что мотоцикл в повороте занимает гораздо больше пространства, чем в движении по прямой. Из-за этого случаются неприятности.
Зацикливание взгляда на точке входа или апексе
Действительно, это распространенная ошибка, новички часто смотрят на то, что хотят объехать, вместо того, куда хотели бы попасть и по итогу не вписываются в поворот или не видят того, что находится за апексом, не успевают банально занять удачное положение, потом дергаются внутри поворота, чтобы выйти из него красиво.

Зацикливание у опытных мотоциклистов случается на закрытых поворотах, когда непонятно, какую траекторию задать. Они стараются рассмотреть, что же там за апексом, вместо того, чтобы снизить скорость еще больше (ведь на низкой скорости легче маневрировать), в результате влетают в поворот и не успевают корректировать траекторию, потому что находятся слишком близко к апексу, а поворот внезапно оказывается слишком резким.
Это изначально кажется, что все просто. Но лучше потратить время на понимание поведения мотоцикла в поворотах и осознание принципа работы с ними, чтобы не оказаться в неловкой ситуации, судорожно ища выход.
Мотоцикл в повороте
Рассмотрим некоторые моменты, касающиеся поведения мотоцикла в наклоне при прохождении поворотов.
Одноколейное транспортное средство, которым является мотоцикл поворачивает за счет наклона. Мы сейчас не будем разбирать способы, которыми можно наклонять мотоцикл, их несколько и применяться они могут как по отдельности, так и в совокупности, в зависимости от скорости мотоцикла, его угла наклона в текущий момент и непосредственной задачи – наклона, выравнивания, удержания баланса в наклоне или корректировки траектории. В этой статье речь о том как ведет себя мотоцикл в наклоне, какие силы на него влияют и как это отражается на действиях и комфорте водителя.
Если мы говорим о движении по дорогам общего пользования на гражданском мотоцикле, то значения углов наклона и значения скоростей для рассматриваемых свойств должны удовлетворять ряду условий:
Во-первых, скорость движения не должна быть намного выше установленных лимитов. Типичное ДТП с участием мотоциклистов происходит на скорости в диапазоне 30-80 км/ч, поэтому стоит рассматривать поведение мотоцикла именно на таких скоростях.
Во-вторых, безопасные углы наклона обычного дорожного мотоцикла особенно в условиях неоднородного или некачественного дорожного покрытия не должны превышать значений 30-40 градусов. К тому же, всегда следует учитывать коэффициент сцепления шин, который зависит от их температуры, давления, степени изношенности, влажности и структуры асфальта.
Основная задача мотоциклиста – безопасно проехать из точки А в точку Б. При увеличении скоростей и углов меняется подход в применении способов наклона и удержания баланса. В рассматриваемых условиях основной способ удержания баланса в наклоне, сам наклон и выравнивание – это усилие, приложенное к рулю – контрруление. Все остальные способы по изменению угла наклона мотоцикла являются дополнительными и лишь только помогают уменьшить усилия, приложенные к рулю, не более.
Во время поворота, находясь в наклоне мотоцикл может стремиться выровняться, завалиться или вести себя нейтрально. То есть для того, чтобы удерживать равновесие, или в данном случае определенный угол наклона, водитель может прикладывать усилия к рулю в направлении поворота, в обратном направлении или не прикладывать вообще.
Поведение мотоцикла в повороте можно представить следующими характеристиками:
На мотоцикл в наклоне действуют одновременно: момент, создаваемый центробежной силой, которая стремится уменьшить угол наклона и момент, создаваемый силой тяжести, которая, в свою очередь его наклоняет

Для упрощения предположим, что
— мотоцикл движется в повороте постоянного радиуса с постоянной скоростью
— гироскопический эффект ничтожен
Предположив, что толщина поперечного сечения шин равна нулю, равновесие моментов позволяет выразить угол наклона через линейную скорость V и радиус поворота Rc (радиус поворота в этом случае измеряется от центра тяжести до оси поворота):

Где Ω угловая скорость. Соответственно, линейная скорость равна произведению угловой скорости на радиус поворота: V = ΩRc
Поскольку мы рассматриваем пример, где мотоцикл находится в равновесии, то равнодействующая центробежной силы и силы тяжести проходит через линию, соединяющую точки контакта шин с дорожной поверхностью. Эта линия лежит в плоскости мотоцикла, если колеса имеют нулевую толщину и углом поворота руля можно пренебречь. В действительности, угол поворота руля не равен нулю никогда и передняя точка контакта немного смещается в сторону относительно плоскости задней сборки или, другими словами, плоскости самого мотоцикла, а линия, соединяющая точки контакта шин, не совпадает с этой плоскостью. Прошу обратить внимание, что она не совпадает с плоскостью именно задней части мотоцикла, взгляните на кинематическую схему мотоцикла тут. Вилка, руль и переднее колесо – отдельная часть.
Теперь рассмотрим мотоцикл с шинами толщиной 2t, который описывает тот же радиус поворота Rc при той же угловой скорости Ω. Так как толщина шин не равна нулю, то фактический угол наклона ϕ, необходимый для равновесия, немного больше геометрического ϕi.

Приращение ∆ϕ можно выразить уравнением

То есть фактический угол наклона можно выразить так:

Уравнение показывает, что ∆ϕ увеличивается как по мере увеличения угла наклона и радиуса поперечного сечения шин, так и по мере уменьшения высоты центра тяжести h. Поэтому использование широких шин вынуждает водителя использовать большие углы наклона по отношению к углу, необходимому для мотоцикла с шинами меньшего поперечного сечения. Кроме того, при равных поперечных сечениях шин, описывающих один и тот же поворот с одинаковой скоростью движения, мотоцикл с низким центром тяжести должен быть наклонен больше, чем мотоцикл с более высоким центром тяжести.
Угол наклона мотоцикла на повороте в значительной степени зависит от положения водителя. Наклоняясь относительно мотоцикла, водитель тем самым может изменять положение центра тяжести всей системы. Рассмотрим возможные варианты. Если водитель наклоняется на тот же угол, что и мотоцикл, то положение центра тяжести всей системы остается неизменным.

В таком случае у водителя есть возможность корректировки угла наклона мотоцикла относительно корпуса на протяжении всего поворота в обоих направлениях – в сторону увеличения наклона и наоборот.

Если водитель наклоняет туловище в сторону внутренней части поворота и одновременно поворачивает ногу так, чтобы она почти касалась земли коленом, ему удается уменьшить угол наклона мотоцикла. Такое положение тела позволяет существенно уменьшить угол наклона мотоцикла при прохождении поворота или, другими словами, позволяет в одном и том же повороте, с одним и тем же углом наклона мотоцикла пройти поворот на бОльшей скорости. Такой прием оправдан когда задача состоит в том, чтобы пройти поворот быстрее и когда нет предпосылок для корректировки траектории внутри поворота. К тому же корректировка траектории на больших углах наклона, где используется такое положение тела подразумевает использование других способов (trailbraking, упор на колено)

Но, вернемся к основному способу изменения угла наклона мотоцикла – контррулению. Контрруление позволяет держать равновесие в прямолинейном движении на любой скорости, выводить мотоцикл из состояния равновесия и наклонять его в требуемую сторону и поддерживать мотоцикл в наклоне в состоянии равновесия. Все что требуется от водителя мотоцикла в данных условиях – прикладывать усилие к рулю разной направленности и силы.
Поведение мотоцикла в наклоне зависит от различных геометрических параметров, таких как: величина колесной базы, оффсет, угол наклона рулевой колонки, радиусы колес и радиусы поперечного сечения шин и от распределения массы и жесткости шин. Свойства шин, в частности, очень важны, поскольку угол поворота руля сильно зависит от разницы между углами бокового скольжения.
Угловую скорость мотоцикла правильнее всего выражать через линейную скорость заднего колеса:

В знаменателе здесь расстояние от центра поворота до пятна контакта заднего колеса.
Если предположить, что колеса не пробуксовывают относительно дорожного полотна (продольно, в направлении движения), то скорость вращения колес ω можно выразить через линейную скорость мотоцикла V, его угол наклона ϕ и угол поворота руля ∆ (в данном случае это кинематический угол, а не фактический)

В действительности же в фазах разгона и торможения всегда происходит продольное скольжение заднего колеса. В фазе торможения наблюдается значительное проскальзывание переднего колеса, в условиях без разгона и торможения проскальзывание происходит за счет сопротивления качению. Важно отметить, что при одной и тоже линейной скорости угловая скорость колес увеличивается по мере наклона, поскольку уменьшается расстояние между пятном контакта и осью колеса.

Когда углы бокового скольжения равны нулю, то фактический угол поворота руля равен кинематическому. Силы реакции опоры в точках контактов каждого из колес зависят от углов бокового скольжения шин, угла наклона мотоцикла и вертикальных нагрузок. Эти силы могут быть выражены следующими линейными выражениями, когда углы скольжения и наклона малы

Константа k (выраженная в радианах-1) представляет собой коэффициенты жесткости шин
kφ коэффициент жесткости на прогиб
kλ коэффициент жесткости на изгиб
С увеличением жесткости уменьшается угол бокового скольжения.
Фактический угол поворота руля ∆* можно выразить через кинематический и углы скольжения для переднего и заднего колес:

Или через кинематический угол и углы наклона рулевой колонки ε и наклона мотоцикла φ.
Радиус поворота, описываемого траекторией заднего колеса, также зависит от углов бокового скольжения и кинематического угла поворота руля:

Где p колесная база.
На небольших углах наклона мотоцикла, когда мал угол поворота руля и углы бокового скольжения колес можно для упрощения использовать формулу:

То есть радиус поворота (для заднего колеса) это отношение колесной базы к углу поворота руля.
Вернемся к поведению мотоцикла, находящегося в наклоне. Как уже говорили выше, он может стремиться к завалу, к выравниванию или оставаться в наклоне, если не прикладывать внешних усилий – нейтральная поворачиваемость. Фактический угол поворота Δ* равен кинематическому углу поворота Δ, выбранному водителем, если углы бокового скольжения обоих колес равны.
В этом случае рулевая система имеет “нейтральное » поведение, то есть, если в повороте отпустить руки, то мотоцикл продолжит движение по заданной траектории. В других случаях, когда фактический угол поворота руля больше или меньше кинематического, то мотоцикл будет стремиться либо завалиться, либо выровняться.
Поведение рулевого управления, или другими словами – поворачиваемость, может быть выражено с помощью коэффициента рулевого управления ξ:

Другими словами, это отношение кинематического (или виртуального) радиуса поворота для заднего колеса к фактическому или отношение фактического угла поворота руля к кинематическому и зависит от соотношения углов бокового скольжения переднего и заднего колес
Если это отношение равно единице, то мотоцикл имеет нейтральную поворачиваемость. При этом углы бокового скольжения переднего и заднего колес равны λf = λr
Если ξ > 1, то мотоцикл стремится завалиться и водителю требуется создавать усилие на руле для удержания мотоцикла в наклоне. λf > λr это избыточная поворачиваемость.
Если ξ Текст: Мотошкола.ру Vittore Cossalter
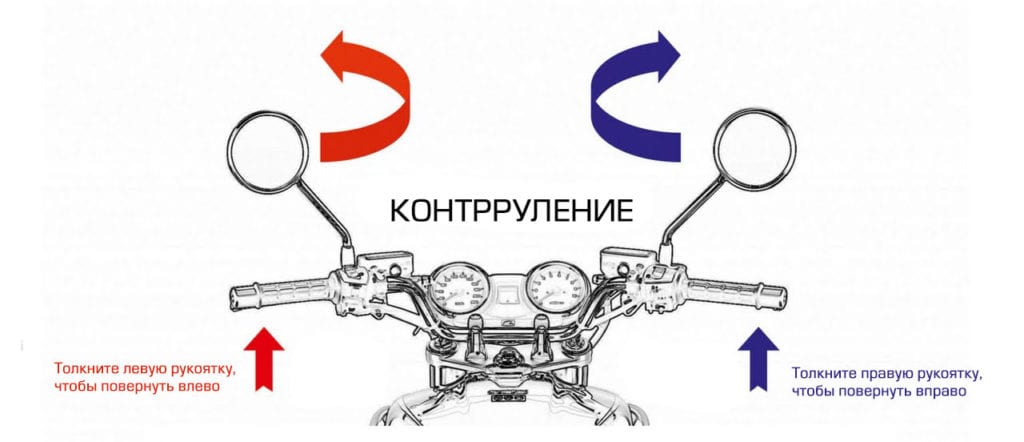
Контрруление на мотоцикле
Руление на мотоцикле отличается от руления на автомобиле. Если руль машины повернуть вправо, она и повернёт вправо. С мотоциклом всё прямо противоположно: если повернуть его руль вправо, он будет стремиться поехать влево. Такие различия связаны с центробежной силой, которая по-разному действует на поведение одноколейных и двухколейных транспортных средств.
Контрруление начинает работать со скорости примерно 15 км/ч. Этот приём используют все, кто умеет ездить на велосипеде и мотоцикле, причём делают это они машинально. Нужный угол наклона достигается в несколько долей секунды. Новички могут легко запутаться в технике, ведь когда рулишь в одну сторону, мотоцикл поворачивает в противоположную. Но на практике всё происходит на уровне интуиции.
Для поворота на мотоцикле нужно наклониться всем корпусом. Когда райдер наклоняется в поворот, он выдерживает баланс между силой тяжести, тянущей его к земле, и центробежной силой, направляющей его к внешнему радиусу поворота. Байк поворачивает, когда водитель делает наклон и контролирует угол.
Заставить транспортное средство повернуть без приёма контрруления нельзя. Поворот возникает вследствие наклона, и контрруление в этом случае — самый действенный способ сделать это.
Содержание материала
ЧАСТЬ 1. ФИЗИКА
 ГЛАВА 2. РУЛЕНИЕ
ГЛАВА 2. РУЛЕНИЕ
 ГЛАВА 2. РУЛЕНИЕ
ГЛАВА 2. РУЛЕНИЕПоскольку мотоцикл является одноколейным транспортным средством, он неустойчив в статике и должен наклоняться в повороте. Именно поэтому руление мотоциклом гораздо более сложный процесс, чем руление автомобилем. Чтобы понять, как управлять мотоциклом, давайте для начала разберемся с рулевой геометрией.
Кастор и вынос
Возможно, вы наталкивались на эти термины в мотожурналах, Что же они означают?
Наличие кастора и выноса приводит к подруливающему эффекту. Вы много раз наблюдали его, катая тележку по супермаркету или участвуя в гонках на офисных креслах. Не важно, в какую сторону вы толкаете тележку или кресло, колеса немедленно выравниваются по направлению движения. А все потому, что ось поворота колеса пересекает землю не в точке касания колеса.
Рассматривайте вынос как «стабилизирующий рычаг». Чем он больше (чем длиннее рычаг), тем более устойчиво колесо к отклонениям.
Контрруление против руления телом
С тех пор, как я сел за руль байка, не утихают споры между поклонниками этих способов управления мотоциклами. Я лично считаю, что с помощью наклона и изменения положения тела вполне можно корректировать траекторию в повороте. Однако такой способ совершенно не годится для быстрого руления. Потом я встретил экспериментальное доказательство этого, сделанное Кейтом Кодом. Он снабдил мотоцикл дополнительным рулем, не связанным с рулевой колонкой, но с продублированными ручками тормоза, газа и сцепления. Любой желающий, прокатившись на этом мотоцикле, мог убедиться, что телодвижения приводят лишь к слабым отклонениям байка, ни о каком эффективном рулении не может быть и речи.
Как работает контрруление
 Контрруление сводится к толканию от себя внутренней по отношению к повороту рукоятки руля. Поначалу это кажется странным, ведь тем самым руль поворачивается в сторону, противоположную повороту. На самом деле, контрруление, благодаря центробежной силе, действующей на мотоцикл, заставляет его наклониться в сторону поворота.
Контрруление сводится к толканию от себя внутренней по отношению к повороту рукоятки руля. Поначалу это кажется странным, ведь тем самым руль поворачивается в сторону, противоположную повороту. На самом деле, контрруление, благодаря центробежной силе, действующей на мотоцикл, заставляет его наклониться в сторону поворота.
Некоторые думают, что при контррулении переднее колесо отклоняется от оси симметрии байка в сторону, противоположную повороту. Это верно только для начального момента поворота из вертикального положения. А вот, например, в медленных крутых поворотах колесо при контррулении может по-прежнему смотреть внутрь поворота.
Вождение мотоцикла основано на равновесии. Когда байк наклоняется для поворота, на него начинает действовать сила тяжести, стремящаяся уронить его на землю. Эта сила уравновешивается центробежной силой, стремящейся опрокинуть байк в другую сторону. Когда мотоциклист свешивается, то есть смещает тело внутрь поворота, он увеличивает рычаг, к которому приложена сила тяжести. Благодаря этому система водитель-мотоцикл может противостоять большему значению центробежной силы. Именно в свешивании и заключается секрет быстрого прохождения поворотов профессиональными гонщиками.
Итак, контрруление приводит к наклону и повороту. Чем сильнее вы давите на руль, тем быстрее байк наклоняется, чем дольше вы давите, тем больше угол наклона. Как только вы достигаете желаемого угла наклона, вы перестаете давить на руль, и байк стабилизируется на траектории, благодаря выносу и гироскопическому эффекту.
 Гироскопический эффект
Гироскопический эффект
Даже при прямолинейном равномерном движении мотоцикл совершает низкочастотные колебания. Водитель их даже не замечает. Эти колебания вызываются неровностями дороги, эластичностью покрышек, постоянным перераспределением веса из-за работы подвесок и другими факторами.
В момент, когда мотоцикл начинает наклоняться, гироскопическая прецессия заставляет колесо повернуться в сторону наклона. Тут же в действие вступает и центробежная сила, которая выравнивает байк. Процесс повторяется снова и снова, приводя к низкочастотным колебаниям.
В паре с прецессией работает гироскопический момент. Чтобы почувствовать, что это такое, открутите колесо от велосипеда, возьмите его за ось и попросите товарища раскрутить его посильнее. Теперь попробуйте рулить колесом. Обратите внимание, как оно сопротивляется вашим усилиям, стремясь сохранить первоначальное прямое положение. Если же вы попробуете наклонить колесо, как будто вы входите в поворот, оно само будет стремиться повернуть в сторону наклона из-за действия гироскопической прецессии.
Гироскопический момент увеличивает инерцию колеса, вот почему на высоких скоростях рулить труднее. Для борьбы с этим моментом гонщики применяют облегченные колеса, улучшающие управляемость. Позитивный эффект гироскопического момента заключается в увеличении стабильности. Именно благодаря нему можно убрать руки с руля на высокой скорости, и не упасть. На низкой скорости так не получится.
Рулите одной рукой
 Мой совет может показаться странным, но во время занятий в ARC я заметил, что большинству курсантов трудно проехать по узкому коридору, если они рулят обеими руками. Две руки как будто борются друг с другом за право управлять мотоциклом. Проблему легко заметить, если обратить внимание на напряженные и зажатые руки курсантов.
Мой совет может показаться странным, но во время занятий в ARC я заметил, что большинству курсантов трудно проехать по узкому коридору, если они рулят обеими руками. Две руки как будто борются друг с другом за право управлять мотоциклом. Проблему легко заметить, если обратить внимание на напряженные и зажатые руки курсантов.
1Этот вывод я сделал, когда просматривал (многочисленные видеозаписи занятий в моей 1школе. Вскоре мне представился случай проверить его на практике. Я занимался в школе Фредди Спенсера, и никак не мог точно пройти один из поворотов трассы. Несколько раз я чуть было не вылетал на обочину. Тогда я решил рулить в этом повороте только внутренней рукой. И все
немедленно изменилось! Я использовал привычную точку для входа в поворот и вылетел вовнутрь поворота, потому что байк повернул неожиданно быстро. Фредди, еще раз прошу у тебя прощения. Я был слишком увлечен процессом.
Как только я включил «руление одной рукой» в программу школы, мои курсанты стали демонстрировать замечательные успехи. Они перестали заниматься армрестлингом сами с собой, и байки поехали как по волшебству. Если мотоциклу не мешать, он начинает поворачивать быстрее и плавнее. На самом деле, как только водитель перестает прикладывать усилия к внешней рукоятке руля, байк стремится уменьшить радиус траектории. Теперь многим курсантам приходилось бороться с избыточной поворачиваемостью. С течением времени они научились контролировать угол наклона в повороте с помощью газа. Их траектории стали стабильнее и плавнее.
Позже один профессиональный автогонщик сказал мне, что они используют тот же метод во время дождевых гонок. Они просто снимают одну руку с руля, чтобы не мешать покрышкам максимально использовать сцепление с мокрой трассой.



