Головная боль TU — дроссель и Ко)

Всем привет!
Эта статья стала «настольной книгой» для меня. Мы с TU уже пару месяцев боремся с одно доставучей бедой сюда Поэтому хочу поделиться инфой.
Электронный привод акселератора
Устройство и принцип действия
При электронном приводе акселератора перемещение дроссельной заслонки осуществляется при помощи электродвигателя. При этом отпадает необходимость в традиционной механической связи между педалью акселератора и дроссельной заслонкой. Это означает, что намерение водителя с педали акселератора передается в блок управления. Затем осуществляется перемещение дроссельной заслонки. Благодаря этому блок управления может посредством перемещения дроссельной заслонкой влиять на величину крутящего момента двигателя даже в том случае, когда водитель не меняет положения педали акселератора. Это дает возможность достижения лучшей координации между системами двигателя. Ниже Вы увидите, что электронный привод акселератора – это значительно больше, чем простая
замена механического привода.
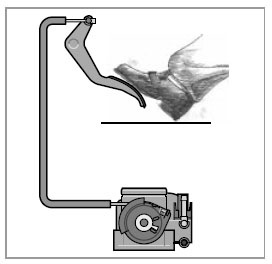
Водитель нажимает педаль акселератора, и через тягу акселератора усилие непосредственно передается на дроссельную заслонку и вызывает ее перемещение. Электронное управление двигателем при этом
не имеет никакой возможности повлиять на положение дроссельной заслонки. Чтобы изменить крутящий момент двигателя, необходимо воздействовать на другие параметры режима двигателя, например, на момент зажигания и впрыска топлива. Только в режиме холостого хода и при действии круиз-контроля осуществляется электронное регулирование работой двигателя.
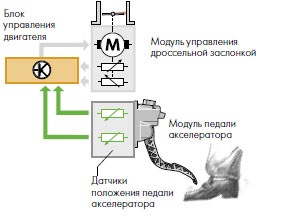
Электронно-электрическое перемещение дроссельной заслонки.
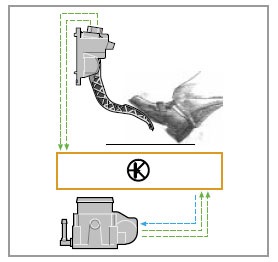
В этом случае перемещение д/з по всему пути происходит при электронном управлении и электрическом приводе. Водитель в соответствии с его намерениями по изменению мощности двигателя нажимает педаль акселератора. Положение педали отслеживается датчиками, и соответствующие сигналы передаются блоку управления двигателя. Далее происходит перемещение д/з в соответствии с намерениями водителя. Если же появляется необходимость изменения крутящего момента двигателя по причинам обеспечения безопасности движения или экономии топлива, блок управления двигателя может изменить положение д/з без изменения водителем положения педали акселератора. Достоинство такого регулирования состоит в том, что блок управления определяет положение дроссельной заслонки в соответствии с пожеланиями водителя, экологическими требованиями, необходимостью обеспечения безопасности движения и снижения расхода топлива.
———————————————————————————————————————————————————
Описание системы
“Инструментами” управления двигателем в части крутящего момента двигателя являются
дроссельная заслонка, давление наддува, момент впрыска топлива, отключение цилиндров и
момент зажигания.

Регулирование крутящего момента двигателя посредством механического привода д/з. Различные сигналы, касающиеся величины крутящего момента двигателя, поступают в блок управления двигателя и там обрабатываются. Однако оптимальной величины крутящего момента получить не удается, поскольку блок управления двигателя не может оказать прямого воздействия на дроссельную заслонку, управляемую механически педалью акселератора. Регулирование крутящего момента двигателя посредством электронного
управления д/з — в этом случае возможно достижение оптимального значения крутящего момента
посредством электронного регулирования работой двигателя.
Как это происходит?
Блок управления двигателем суммирует все внешние и внутренние требования в отношении
величины крутящего момента двигателя и по ним рассчитывает необходимую величину
момента. Это намного точнее и эффективнее, чем было прежде.
Внутренние требования предъявляются со стороны:
— условий пуска двигателя;
— подогрева катализатора;
— регулирования холостого хода;
— ограничения мощности;
— ограничения частоты вращения;
— регулирования состава смеси по содержанию кислорода в отработавших газах.
Внешние требования предъявляются со стороны:
— автоматической коробки передач (в точках переключения);
— тормозной системы (контроль тяги, режим принудительного холостого хода);
— климатической установки (включение и выключение компрессора);
— круиз-контроля.
———————————————————————————————————————————————————-
Процесс регулирования.
После оценки всех внутренних и внешних требований в отношении величины крутящего момента блок управления двигателя рассчитывает оптимальный крутящий момент двигателя. Фактический крутящий момент определяется расчетом по частоте вращения двигателя, сигналу о нагрузке двигателя и моменту зажигания. В ходе регулирования блок управления двигателя сначала сравнивает фактический
крутящий момент с оптимальным моментом. Если эти величины не совпадают, блок
управления двигателя расчетом определяет направление и величину необходимого
воздействия в целях достижения совпадения фактического и оптимального крутящего
момента.
Для этого у блока управления есть два пути.
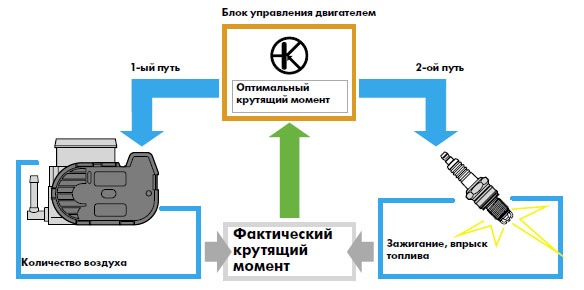
На одном пути регулированию подлежат параметры, которые влияют на наполнение цилиндров. При этом речь идет о параметрах, изменение которых относительно долго влияет на направление изменений крутящего момента двигателя. Эти параметры:
— угол открытия дроссельной заслонки и
— на двигателях с турбонаддувом давление наддува.
На втором пути изменению подлежат параметры, которые относительно быстро изменяют величину крутящего момента вне зависимости от наполнения цилиндров. К этим параметрам относятся:
— момент зажигания;
— момент впрыска топлива;
— отключение цилиндра(ов).
————————————————————————————————————————————————————
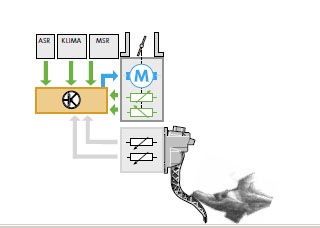
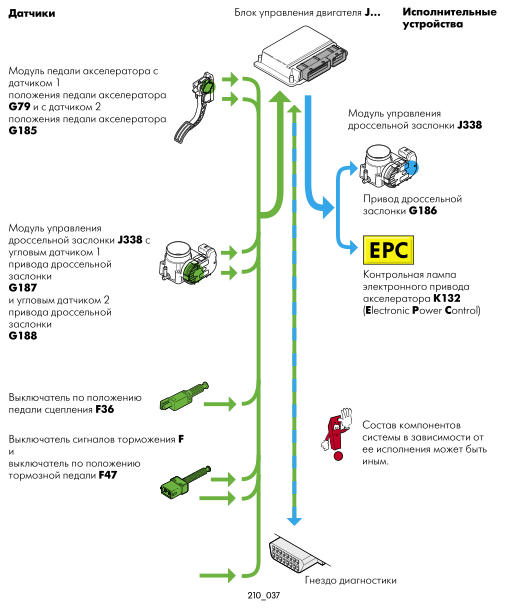
Электронный привод дроссельной заслонки состоит из:
— педального модуля с датчиками положения педали акселератора;
— блока управления двигателя;
— модуля управления дроссельной заслонки;
— контрольной лампы электронного привода дроссельной заслонки.
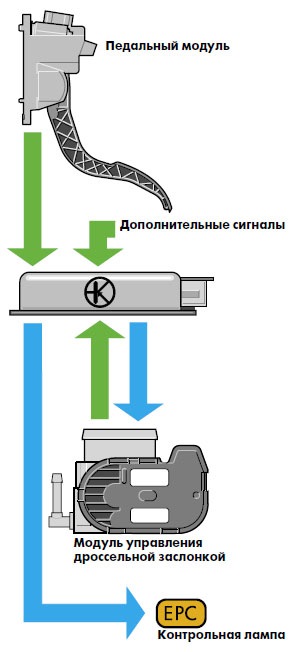
Педальный модуль посредством датчиков непрерывно определяет положение педали акселератора и передает соответствующий сигнал блоку управления двигателя. Блок управления двигателя определяет по этому сигналу намерение водителя в отношении изменения мощности двигателя и отвечает на это соответствующим изменением крутящего момента двигателя. Для этого блок управления подает управляющий сигнал приводу д/з для приоткрытия ее или, наоборот, некоторого закрывания. При этом принимаются во внимание другие пожелания в отношении крутящего момента двигателя, например, со стороны климатической установки. В этом и состоит смысл “электронного привода
акселератора” (дроссельной заслонки). Модуль управления д/з обеспечивает требуемую массу воздуха, поступающего в цилиндры. Привод д/з воздействует на д/з в соответствии с командами блока управления двигателя. О положении д/з постоянно поступают сигналы от угловых датчиков положения дроссельной заслонки в блок управления двигателя. Контрольная лампа электронного привода акселератора сигнализирует водителю, что в системе электронного привода имеется неисправность.
————————————————————————————————————————————————————
Действие электронного привода.
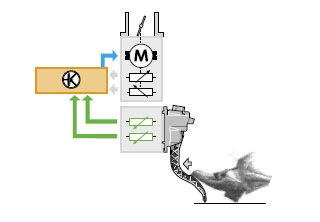
На холостом ходу блок управления двигателем узнает по сигналам от датчиков положения педали
акселератора, что педаль не нажата. Начинается режим регулирования холостого хода.
Блок управления двигателем управляет приводом д/з; при помощи
электродвигателя д/з перемещается. В зависимости от того, насколько различаются фактическая и оптимальная величины частоты вращения двигателя, зависит величина изменения угла открытия д/з.

Оба угловых датчика положения д/з непрерывно передают информацию блоку управления двигателя. Датчики расположены в модуле управления д/з.
————————————————————————————————————————————————————
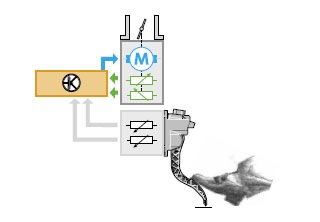
Перемещение педали акселератора.
Блок управления двигателя из сигналов от датчиков положения педали акселератора
получает информацию о положении педали. Желаемое водителем перемещение дроссельной заслонки осуществляется по команде блока управления посредством привода д/з. Дополнительно поступают соответствующие команды по изменению момента зажигания, впрыска и, при необходимости, величины давления наддува.
Оба угловых датчика определяют положение д/з и сообщают о нем блоку управления.
Для расчета необходимого положения д/з блоком управления принимаются во внимание дополнительные требования. Например:
— по ограничению частоты вращения двигателя;
— со стороны круиз-контроля (GRA);
— со стороны системы контроля тяги (ASR);
— со стороны регулирования принудительного холостого хода (MSR).
Если в конечном счете это все отражается в необходимости изменения крутящего момента,
может быть изменено положение д/з без какого-либо воздействия водителя на педаль акселератора.
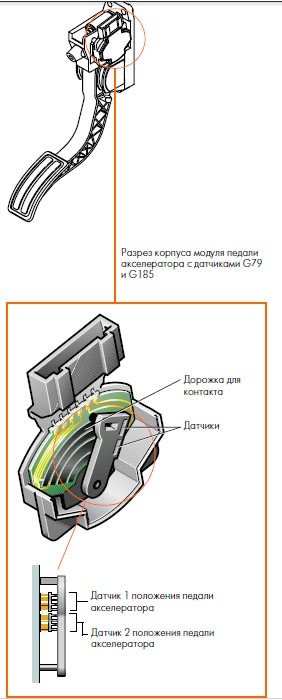
— педали акселератора;
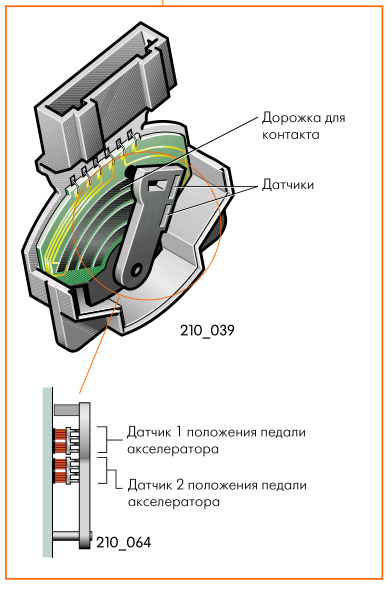
— датчика 1 положения педали акселератора G79
— датчика 2 положения педали акселератора G185.
Используются два одинаковых датчика для обеспечения максимально возможной
надежности. Здесь речь идет о резервированной системе. Это означает, что вполне было бы достаточно информации от одного датчика.
Использование сигналов посредством сигналов от обоих датчиков положения педали акселератора блок управления двигателя узнает положение педали в каждый момент времени. Оба датчика представляют собой потенциометры со скользящим контактом, укрепленным на общем валу. При каждом изменении положения педали изменяется сопротивление датчиков и, соответственно, напряжение, которое передается на блок управления двигателя. (Похоже они у меня и подглючивают…)
Работа при отсутствии сигнала!
При отсутствии одного сигнала:
— это вносится в регистратор неисправностей, и включается контрольная лампа электронного привода акселератора.
— система управляется сначала на холостом ходу. Когда будет опознан второй датчик в
ходе определенного контрольного срока на режиме холостого хода, опять будет возможно движение автомобиля.
— при полном нажатии на педаль частота вращения двигателя увеличивается медленно.
— дополнительное опознавание холостого хода по положению педали осуществляется
посредством выключателя сигналов торможения F или выключателя по
положению тормозной педали F47.
— комфортные функции, например, круиз- контроль или регулирование двигателем в
режиме принудительного холостого хода, отключаются.
При отсутствии обоих сигналов:
— это вносится в регистратор неисправностей, и включается контрольная лампа электронного
привода акселератора.
— двигатель работает только на повышенных оборотах холостого хода (максимально
1500 об/мин) и не реагирует на педаль акселератора.
————————————————————————————————————————————————————
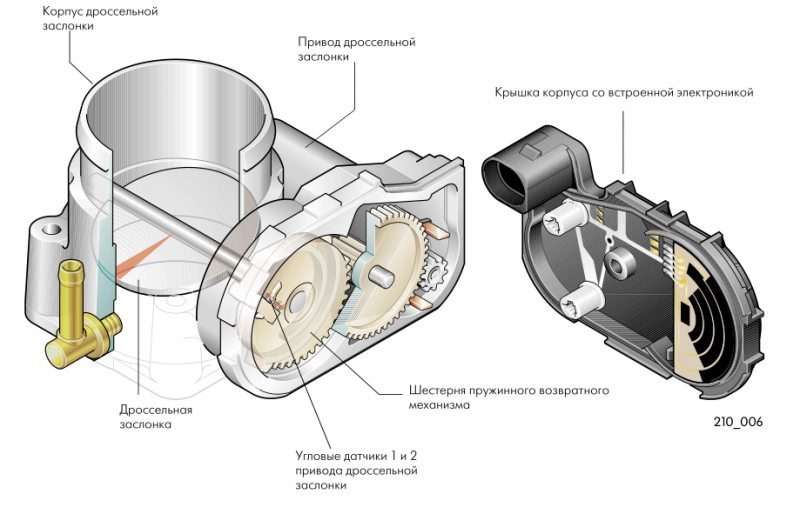
Модуль управления дроссельной заслонки.
Он расположен на впускной трубе. Он служит для обеспечения подачи нужного количества воздуха в
цилиндры. Устройство, Модуль состоит из:
— корпуса дроссельной заслонки;
— дроссельной заслонки;
— привода дроссельной заслонки G186;
— углового датчика 1 привода дроссельной заслонки G187;
— углового датчика 2 привода дроссельной заслонки G188.
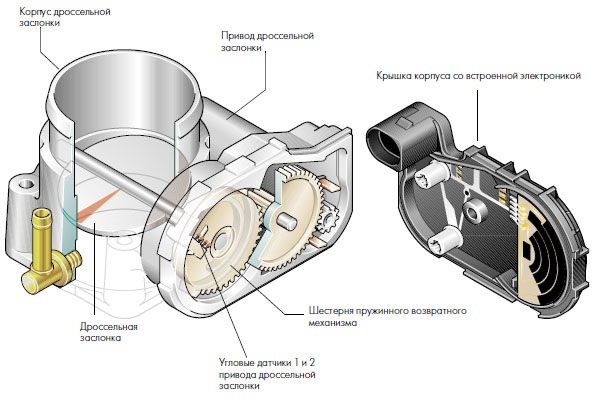
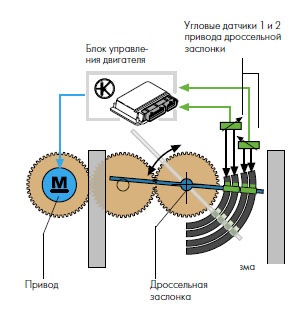
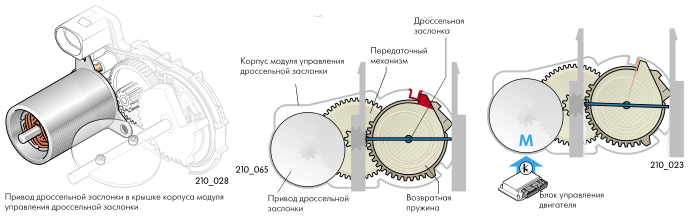
Действие открытие и закрытие дроссельной заслонки осуществляется электродвигателем по сигналу
блока управления двигателя. Оба угловых датчика посылают сигналы блоку управления двигателя о положении д/з. Два датчика установлены в целях повышения надежности системы.
Если блок управления двигателя получает от одного из угловых датчиков неразличимый сигнал
или вообще не получает никакого сигнала:
— это вносится в регистратор неисправностей, и включается контрольная лампа
электронного привода акселератора.
— подсистемы, которые в какой-то степени определяют крутящий момент (например,
круиз-контроль, регулирование двигателя в режиме принудительного холостого хода)
отключаются.
— для контроля оставшегося датчика используется сигнал нагрузки.
— педаль акселератора действует нормально.
Если блок управления двигателя получает от обоих угловых датчиков неразличимые сигналы
или вообще не получает никаких сигналов:
— это вносится в регистратор неисправностей, и включается контрольная лампа
электронного привода акселератора.
— привод д/з отключается.
— двигатель работает только с повышенной частотой холостого хода 1500 об/ мин и больше не реагирует на педаль акселератора.
——————————————————————————————————————————————————
Из выше написанного следует, моя проблема может быть в 2х узлах: электромоторчик привода д/з или датчики педали акселератора (потенциометры 1 и 2). Электромоторчик был починен…переходим ко второму)
БУДЬТЕ ГРАМОТНЫ! НО НЕ ЗАБЫВАЙТЕ — ГОРЕ ОТ УМА)
Электронная дроссельная заслонка
Электронное управление дроссельной заслонкой позволяет ECM (Engine Control Module) регулировать крутящий момент, подстраивая режим работы двигателя под условия движения. Благодаря этому удается снизить расход топлива и количество вредных выбросов в атмосферу. Давайте рассмотрим, как работает электронная дроссельная заслонка, устройство и принцип работы элементов управления.
Компоненты системы
Принцип работы электронной педали газа
До появления электронной педали акселератора нажатие на педаль через систему тяг и тросов приводило к повороту оси ДЗ. Следующим этапом развития инжекторных двигателяей стало отслеживание угла открытия ДЗ с помощью резистивных датчиков положения. В работу двигателя электроника вмешивается только в режиме холостого хода и при активации круиз-контроля.

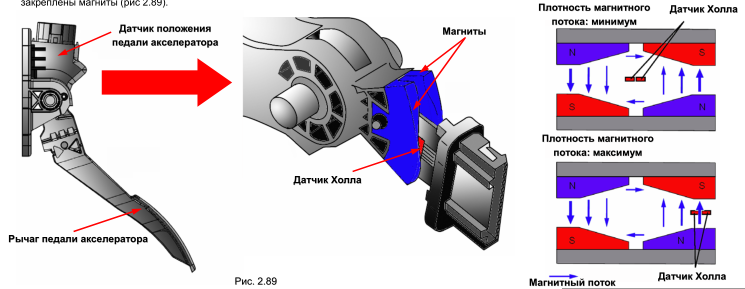
В системе с электронным перемещением ДЗ механическая связь между заслонкой и педалью отсутствует. Угол нажатия педали отслеживается с помощью датчиков двух типов:
Внутри корпуса педального узла всегда размещена пара потенциометров, следовательно, две выходные системы – основная и резервная. При нажатии на педаль меняются оба выходных напряжения. По соотношению уровней сигналов ЭБУ мониторит исправность датчиков. На графике ниже указаны уровни сигналов, используемые на автомобилях Mitsubishi с системой впрыска MPI. Уровни напряжения основного и резервного датчика отличаются в два раза.
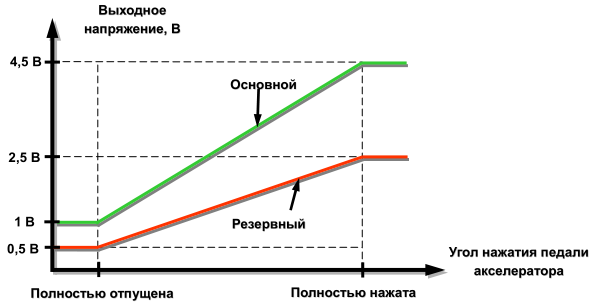
На некоторых системах низкий уровень сигнала на резервном датчике будет соответствовать высокому уровню на основном. Соответственно, если на одном измерителе напряжение при нажатии педали падает, то на втором оно должно пропорционально возрасти.
Дроссельная заслонка с электронным управлением
Модуль дроссельного узла состоит из корпуса, дроссельной заслонки, датчиков положения и электродвигателя постоянного тока. Как и в электронной педали газа, для отслеживания положения ДЗ используется пара контактных либо бесконтактных датчиков на эффекте Холла.
Вращение от статора электродвигателя на ось ДЗ передается через пластиковые шестерни. На корпусе имеется механический ограничитель хода, упираясь в который дроссельная заслонка полностью закрывается. В штатном режиме заслонка полностью никогда не закрыта во избежание закусывания ее в корпусе при нагреве. Ограничитель необходим для адаптации ДЗ, в процессе которой ЭБУ запоминает крайнее положение заслонки в открытом и закрытом состоянии. В штатном режиме заслонка останавливается не доходя до нижнего механического ограничителя.
Функция самодиагностики
В случае отсутствия сигнала с датчиков положения ДЗ заслонка перемещается в аварийное положение, при котором двигатель работает только в режиме повышенного холостого хода (порядка 1500 об./мин). На приборной панели при этом может загореться Check Engine или контрольная лампа EPC.
В случае потери связи с датчиками либо любой аномалии в их показаниях в энергонезависимую память записывается соответствующий код неисправности. Считать ошибки можно через разъем OBD-II с помощью мультимарочного или специализированного сканера. В случае замены, ремонта, связанного с разборкой модуля ДЗ, или чистки узла, необходимо провести адаптацию дроссельной заслонки.
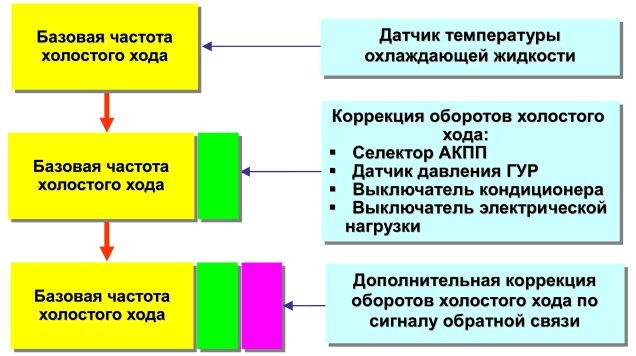
Управление холостым ходом
В системе с электронно-управляемой дроссельной заслонкой отсутствует регулятор холостого хода (РХХ). Его функцию на себя берет электродвигатель ДЗ. Поворачивая заслонку на определенный уровень, ЭБУ дозирует воздух для поддержания оборотов холостого хода. Повышенные обороты холостого хода при прогреве, а также возросшая на двигатель нагрузка (включение кондиционера, фар и прочих мощных потребителей) также компенсируется открытием заслонки.
Базовая частота холостого хода рассчитывается из базовой матрицы с использованием сигнала датчика температуры ОЖ.
Неисправности
Также не стоит забывать о стандартных проблемах с электропроводкой, окислах в разъемах питания.
Как устроен и работает электронный дроссель.

Небольшой обзор о принципе работы электронного дросселя (далее ЭД по тексту).
Спрашивали, отвечаю.
ЭД это тот же «тросиковый» дроссель, но в который «добавили» две сущности:
1. электромотор для вращения заслонки и
2. второй (контрольный) ДПДЗ №2 который работает в «противофазе» с первым: его сигнал
увеличивается или уменьшается на ту же величину, что сигнал с основного ДПДЗ №1.
ЭД могут отличаться:
1. процентом открытия заслонки в обесточенном состоянии. Некоторые полностью закрыты (одна пружина на полное закрытие), некоторые
будут приоткрыты на 5-7% (две пружины, точка равновесия в зоне приоткрытия).
Это приоткрытие позволит работать двигателю автомобиля на малых оборотах в случае
полного выхода из строя электроники ЭД. Таким образом, эти заслонки являются более прогрессивными
чем полностью закрытые, с которыми в случае поломки мотор не будет работать вообще.
2. видом ДПДЗ — контактные (обычные ползунковые переменные резисторы) и
«бесконтактные» (сигнал на выходе формируется электроникой, внутри нет трущихся подвижных контактов).
Схема управления е-дросселем в общем виде выглядит так:
1. Мотор питается ШИМ-питанием. Меняется как скважность ШИМа, так и полярность. Для смены полярности
применяют т.н. H-BRIDGE схемы, реализованные на специализированных микросхемах. Есть целое направление
в микросхемах — H-Bridge drivers.
2. По сигналам с ДПДЗ анализируется положение заслонки и меняется % заполнения ШИМа а также полярность, при необходимости.
3. Контролируются ошибки в работе заслонки.
Все это делает управляющая программа, которая есть в штатном ЭБУ. Так же она может быть организована в отдельном
устройстве. По сути это классическая система управления сервоприводом с удержанием целевого угла поворота.
Есть даже реализации библиотек на Ардуине :).
Вот собственно и вся «магия» электронной заслонки.
Лирические отступления.
1. Все ругают ЭД за его медлительность. Он, дескать, медленно вращается. Чтобы быстро ехало, надо чтобы он вращался мгновенно.
В 99% этого не надо, мотор не успеет за мгновенно открытым дросселем. Нет разницы, будет он открываться за 0.01 или 0.5 сек. У мотора инерционность громадная.
Оценивать работу всей системы только по скорости работы конкретно дросселя можно только от безграмотности.
Надо отличать два совершенно разных момента: как быстро работает конкретно ЭД
и как быстро принимает ЭСУД решение о его открытии и на какой % он ее открывает.
Если вы нажали педаль «в пол» а ЭСУД только через 1 сек принял решение открыть ЭД на 50 или 70% то виноват ЭСУД, а не ЭД.
Сам по себе ЭД очень классная штука, дающая разные плюсы в управлении двигателем.
Ругать его так же глупо как ругать колесо или тормоза. Научитесь с ними работать, как говорится.
2. Чтобы реализовать максимальную скорость работы ЭД необходимы силовые драйверы на ток в 15-20А, это ток на старте мотора
и при смене направления его вращения. Штатные силовые ключи в ЭБУ такой ток не обеспечивают. Там стоят максимально дешевые,
работающие «в край».
Даже если сменить прошивку, то все равно останется ограничение по скорости работы заслонки.
Ключи или будут уходить в защиту или работать в режиме ограничения нарастания тока, в итоге
заслонка все равно будет ездить нес максимальной возможной своей скоростью. Это не плохо, учитывая п.1, но если вы платили
за «тюнинг» по ускорению заслонки то просто знайте что он все равно не «выжимает» все возможное из заслонки.
И это не ЭД «тупой и медленный» а драйверы стоят слабые.
Электронная дроссельная заслонка

Механическая связь заслонки с педалью газа уходит в историю. Вместо неё широко используется электронная дроссельная заслонка. Именно ей и посвящён новый переведенный на русский язык модуль в LCMS ELECTUDE в разделе «Автомобильные основы».
Узел электронно-управляемой дроссельной заслонки содержит привод со встроенным элементом управления. Это означает, что блок управления двигателем подает на модуль электронного управления дроссельной заслонкой сигнал для открытия дроссельной заслонки и обеспечивает достижение фактического значения количества воздуха, поступающего в двигатель для образования топливно-воздушной смеси.

Узел электронно-управляемой дроссельной заслонки состоит из следующих элементов:
Преимущество модуля электронно-управляемой дроссельной заслонки состоит в том, что модуль управления может определять оптимальное положение дроссельной заслонки согласно заданным параметрам. Также осуществляется управление холостым ходом и осуществляется круиз-контроль.
Узел дроссельной заслонки установлен во впускном тракте между датчиком массового расхода воздуха и впускным коллектором, подающим воздух к впускным клапанам.
Расположение
Узел электронно-управляемой дроссельной заслонки расположен между воздушным фильтром и впускным коллектором. При наличии массового расходомера воздуха, воздух сначала проходит через него, а затем через корпус дроссельной заслонки.
Параметры: модуль электронного управления активирует привод дроссельной заслонки. В зависимости от условий эксплуатации и сигналов датчиков блок управления двигателем определяет оптимальное положение дроссельной заслонки согласно заданным параметрам.
Таким образом, можно также легко обеспечить управление круиз-контролем блоком управления двигателем.
Компоненты
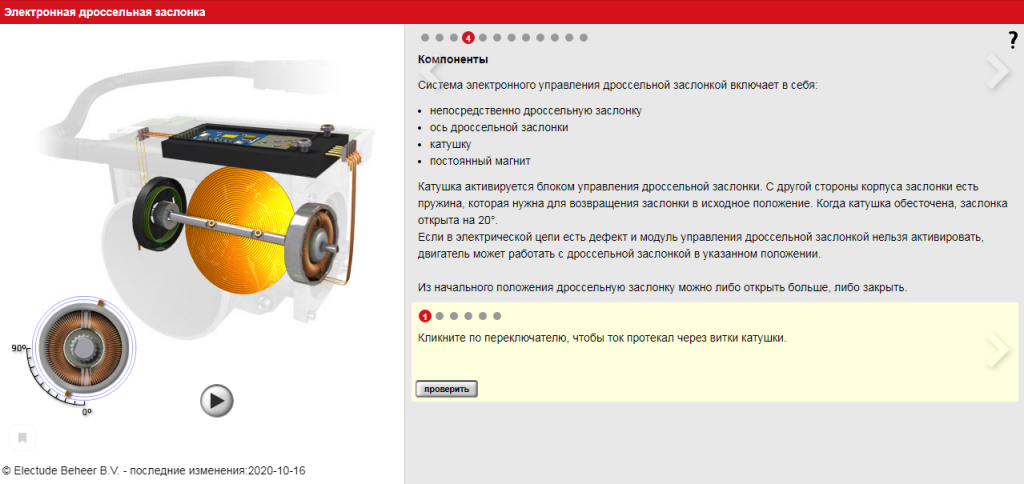
Система электронного управления дроссельной заслонкой включает в себя:
Если в электрической цепи есть дефект и модуль управления дроссельной заслонкой нельзя активировать, двигатель может работать с дроссельной заслонкой в указанном положении.
Из начального положения дроссельную заслонку можно либо открыть больше, либо закрыть.
Блок управления двигателем отправляет данные о требуемом угле дроссельной заслонки в модуль управления дроссельной заслонки, который преобразует его в электрический сигнал, посылаемый на привод заслонки. Для передачи данных используется ШИМ-сигнал. Сигнал блока управления двигателем принимается на клемме C узла электронного управления дроссельной заслонки.
Сигнал ШИМ варьируется от 10% до 90% при частоте 100-300 Гц. Если сигнал находится за пределами указанных значений, дроссельная заслонка возвращается в исходное положение (угол 20º). Реверсивный ток Чтобы перевести дроссельную заслонку из исходного положения в открытое или закрытое положение, ток в катушке должен изменить свое направление (реверсирован). Для этого катушку нужно переключить обратной полярностью тока.
Изменение направления тока осуществляется путем активации выходных каскадов. Эта мостовая схема находится в блоке управления корпуса дроссельной заслонки и им же активируется.
Угол открытия дроссельной заслонки зависит от силы тока, проходящего через катушку.
Регулирование тока
Чтобы установить дроссельную заслонку в любое требуемое положение, необходимо управлять силой тока.
Блок управления может регулировать ток, проходящий через катушку, изменяя проводимость выходного каскада. Недостаток этого метода заключается в том, что выходной каскад нагревается.
Выходной каскад нельзя открыть наполовину, поэтому сила тока регулируется с коэффициентом заполнения рабочего цикла. л
Среднее значение тока достигается быстрым включением и выключением тока, что позволяет избежать перегрева выходного каскада.
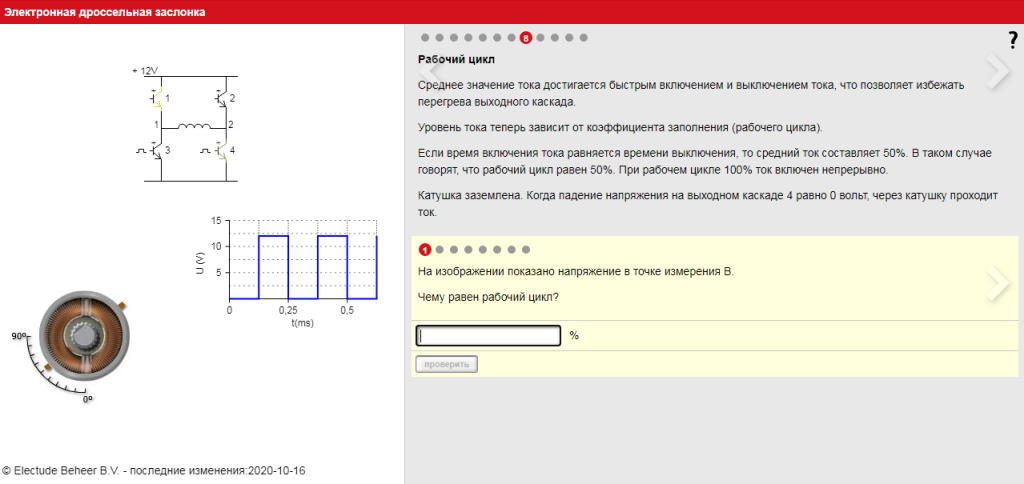
Уровень тока теперь зависит от коэффициента заполнения (рабочего цикла).
Если время включения тока равняется времени выключения, то средний ток составляет 50%. В таком случае говорят, что рабочий цикл равен 50%. При рабочем цикле 100% ток включен непрерывно.
Катушка заземлена. Когда падение напряжения на выходном каскаде 4 равно 0 вольт, через катушку проходит ток.
Датчики положения дроссельной заслонки Положение дроссельной заслонки измеряется датчиками положения дроссельной заслонки. Они расположены по боковым сторонам корпуса дроссельной заслонки.
Согласно условиям безопасности должно быть установлено два датчика положения дроссельной заслонки, каждый со своим собственным сигналом.
Модуль управления электронно-управляемой дроссельной заслонки непрерывно сравнивает оба сигнала, чтобы точно определять фактическое положение заслонки.
Если сигналы от двух датчиков сообщают разную информацию, модуль управления узлом дроссельной заслонки останавливает управление заслонкой и передает код ошибки в блок управления двигателем.
Управление увеличением подачи воздуха прекращается, но, благодаря исходному положению заслонки под углом 20°, двигатель работает с увеличенной скоростью холостого хода, и водитель получает возможность осторожно доехать до мастерской.
Датчик положения дроссельной заслонки состоит из резистивной дорожки и ползунка.
Ось дроссельной заслонки приводит ползунок в движение.
Резистивная дорожка получает напряжение постоянного тока. Часть этого напряжения передается на ползунок.
Величина напряжения на ползунке зависит от точки, в которой он соприкасается с резистивной дорожкой.
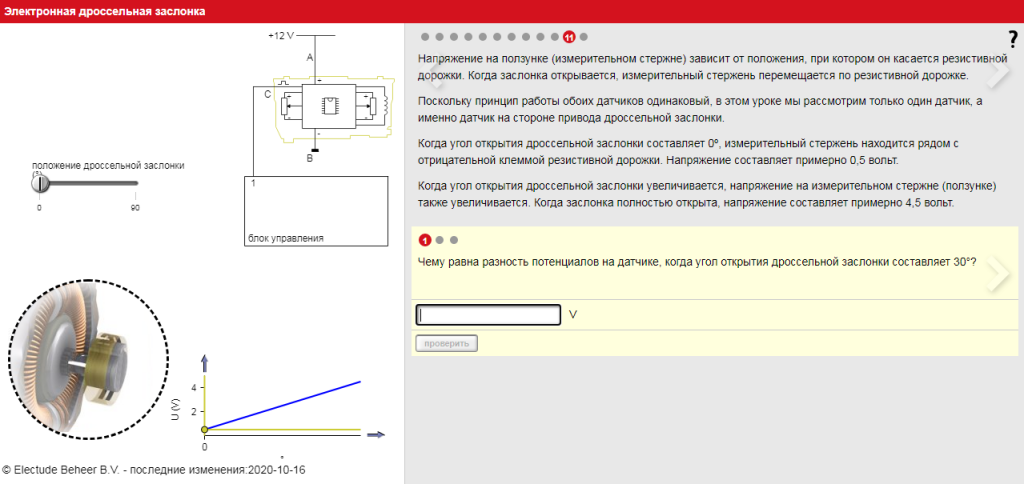
Напряжение на ползунке (измерительном стержне) зависит от положения, при котором он касается резистивной дорожки. Когда заслонка открывается, измерительный стержень перемещается по резистивной дорожке.
Поскольку принцип работы обоих датчиков одинаковый, в этом уроке мы рассмотрим только один датчик, а именно датчик на стороне привода дроссельной заслонки.
Когда угол открытия дроссельной заслонки составляет 0º, измерительный стержень находится рядом с отрицательной клеммой резистивной дорожки. Напряжение составляет примерно 0,5 вольт.
Когда угол открытия дроссельной заслонки увеличивается, напряжение на измерительном стержне (ползунке) также увеличивается. Когда заслонка полностью открыта, напряжение составляет примерно 4,5 вольт.
Управление
После изучения работы отдельных компонентов узла электронно-управляемой дроссельной заслонки, можно переходить к элементам управления.
Блок управления двигателем отправляет сигнал ШИМ о требуемом положении дроссельной заслонки на модуль управления дроссельной заслонкой.
Модуль управления дроссельной заслонкой преобразует полученную информацию в сигналы активации схемы выходных каскадов. Выходные каскады переключают ток, протекающий через катушку, и тем самым регулируется положение дроссельной заслонки.
Датчики положения дроссельной заслонки передают информацию о текущем положении заслонки на блок управления дроссельной заслонкой. Разница между фактическим и заданным значением угла открытия дроссельной заслонки определяет необходимость активации привода управления дроссельной заслонки.
Приобретайте лизензии и модули к электронному обучающему продукту «Автомобильные основы». Получайте доступ к модулям, тестам и симулятору в LMS ELECTUDE. Изучите работу всех систем механизмов, процессы эксплуатации и обслуживания современных транспортных средств. С платформой ELECTUDЕ это по силам в удобной дистанционной форме.



