Программируемые логические контроллеры. Устройство и принцип работы.

Современную промышленность невозможно представить без систем автоматизации. Сложность производственных процессов делает невозможным управление ими вручную, к тому же системы автоматики обходятся гораздо дешевле, чем обслуживающий персонал, да и работают они быстрее и надёжнее. Да что говорить о промышленности – в настоящее время практически ни одно здание не обходится без автоматики. Школы, больницы, детские сады, офисные и складские помещения, загородные дома и коттеджи – все эти объекты оснащены инженерными системами с автоматическим управлением. Несмотря на многообразие применений и сфер использования все системы автоматики работают по одному принципу и обладают схожей структурой, в центре которой находится «мозг» системы – программируемый логический контроллер (ПЛК).
С чего всё начиналось?
 Все начиналось с построения релейно-контактных систем управления, представляющих из себя огромные шкафы, набитые проводами и релейными модулями. В эти шкафы приходили сигналы от датчиков, а на выходе формировались команды исполнительным устройствам. Кроме того, что они были больших размеров, такие системы управления неудобны тем, что они совершенно не гибкие: для того, изменить логику управления, необходимо вручную перебирать всю электрическую схему. С развитием микропроцессорной техники на смену релейным шкафам пришли ПЛК – устройства, выполняющие те же функции, но имеющие принципиально другой механизм преобразования входных сигналов в выходные. Такое преобразование в ПЛК выполняется в соответствии с записанной программой. С появлением контроллеров размеры систем управления уменьшились в десятки раз, значительно упростился процесс их разработки и последующих изменений.
Все начиналось с построения релейно-контактных систем управления, представляющих из себя огромные шкафы, набитые проводами и релейными модулями. В эти шкафы приходили сигналы от датчиков, а на выходе формировались команды исполнительным устройствам. Кроме того, что они были больших размеров, такие системы управления неудобны тем, что они совершенно не гибкие: для того, изменить логику управления, необходимо вручную перебирать всю электрическую схему. С развитием микропроцессорной техники на смену релейным шкафам пришли ПЛК – устройства, выполняющие те же функции, но имеющие принципиально другой механизм преобразования входных сигналов в выходные. Такое преобразование в ПЛК выполняется в соответствии с записанной программой. С появлением контроллеров размеры систем управления уменьшились в десятки раз, значительно упростился процесс их разработки и последующих изменений.
Принцип работы ПЛК

ПЛК работает по циклическому принципу. В самом начале цикла ПЛК сканирует состояния входов, на которые поступают сигналы от датчиков и устройств. Затем в соответствии с алгоритмом программы происходит вычисление состояния выходов. В конце рабочего цикла контроллер устанавливает каждый выход в состояние, которое было определено.
 1. Чтение состояний входов
1. Чтение состояний входов
2. Выполнение программы пользователя
3. Запись состояний выходов
Указанные этапы цикла выполняются последовательно – это означает, что изменения состояний входов не будут «замечены» контроллером во время выполнения программы. По этой причине одним из важнейших параметров ПЛК является время реакции. Если оно окажется больше, чем минимальный период изменения состояний входов, некоторые события, происходящие в системе, будут «пропущены» контроллером.
Также стоит учесть, что и датчики реагируют на изменения в системе не мгновенно. Поэтому полное время реакции системы управления складывается из времени реакции ПЛК и времени реакции датчиков.

Время реакции системы — время с момента изменения состояния системы до момента выработки соответствующей реакции (принятия решения).
Системы реального времени
Все системы можно условно разделить на системы жёсткого и мягкого реального времени.

В системах жёсткого реального времени реакция ПЛК не должна превышать определённый временной порог. При увеличении времени реакции система теряет свою работоспособность.
В системах мягкого реального времени при увеличении времени реакции может происходить сильное ухудшение качества управления, но работоспособность при этом не теряется.
Входы и выходы ПЛК

Дискретные входы – предназначены для ввода сигналов от дискретных датчиков (кнопки, тумблеры, концевые выключатели, термостаты и др.). Напряжение сигнала унифицировано для всех ПЛК и составляет 24 В. Проще говоря, при «появлении» на входе контроллера напряжение 24 В – ПЛК будет считать этот вход «включенным», то есть он примет значение логической «1» в восприятии контроллера.
Дискретные выходы – предназначены для управления устройствами по принципу «включить/выключить» (магнитные пускатели, лампочки, клапаны и др.). Дискретный выход – это обычный контакт, который может замкнуть или разомкнуть управляющую или питающую цепь устройства.

Аналоговые выходы – предназначены для плавного управления устройствами. Унифицированные значения аналогового сигнала на выходах такое же, как и на входах – 4..20мА (0..10В). Например, вентиль может поворачиваться в пределах от 0° до 90°. Ток 4мА повернёт его в положение 0°, а 20мА – в положение 90°. Для того, чтобы повернуть его на 45°, нужно подать на него управляющий сигнал 8мА. Таким образом, меняя значение силы тока на выходе, контроллер может поворачивать вентиль на заданный угол.

Специализированные входы/выходы – не унифицированы, применяются для подключения нестандартных датчиков и исполнительных устройств со специфическим уровнем сигнала, питанием и программной обработкой.
Цифровые интерфейсы ПЛК
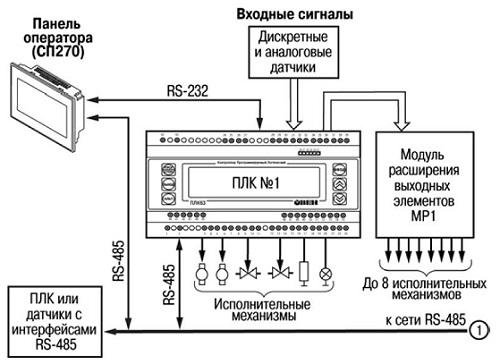
Изначально ПЛК предназначались для управления последовательными логическими процессами. Современные контроллеры помимо логических операций способны выполнять цифровую обработку сигналов. Они могут обмениваться информацией с другими устройствами, такими как панели оператора, GSM-модули, частотные преобразователи, серверы сбора данных и др.

ПЛК могут иметь распределённую структуру, когда модули входов и выходов находятся на значительном удалении от самого контроллера, вблизи объекта управления. Несколько ПЛК, управляющие разными частями одной системы, могут объединяться в сеть для обмена информаций и согласования управляющих действий, а так же передачи всей информации о системе в центральный диспетчерский пункт.

В этих случаях обмен удалённых модулей и устройствами с ПЛК осуществляется по цифровым интерфейсам с использованием специализированных протоколов, таких как Modbus RTU, ModBus TCP, CANopen, Profibus, EtherNet IP и других.
Инструменты пользователя
Инструменты сайта
Боковая колонна
Группы Юнитех
Присоединяйтесь к Юнитех в социальных сетях: группа Вконтакте и страница в Facebook.
Сортировка по релевантности
Содержание
Контроллер (в системах автоматизации)
Определение
Невозможно дать единого определения термина «контроллер», поскольку этим термином называют самые различные устройства. Если мы обратимся к Википедии, то в ней представлено несколько значений этого слова, среди которых следующие:
— контроллер прерываний (микросхема или встроенный блок процессора, отвечающий за возможность обработки запросов на прерывание от разных устройств);
— микроконтроллер (микросхема, управляющая электронными устройствами);
— контроллер электрического двигателя (многоступенчатый, многоцепной коммутационный аппарат с ручным управлением);
— промышленный контроллер (управляющее устройство, применяемое в промышленности и других отраслях для автоматизации технологических процессов);
— программируемый логический контроллер (ПЛК) (промышленный контроллер, предназначенный для выполнения логических операций, т.е. операций алгебры логики) 1)
В данной статье будут рассматриваться контроллеры, применяемые в системах автоматизации, в частности программируемые логические контроллеры.
Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства. 2)
Назначение
Конструкция и принцип действия
Конструктивно ПЛК состоит из управляющего блока, модулей входов/выходов и модулей связи. Важнейшее место в составе любого ПЛК занимает процессорный модуль. К нему присоединяются модули расширения, источники питания, линии связи с дополнительным оборудованием. Кроме названных устройств, в состав контроллера могут входить и некоторые дополнительные устройства. 5) 
В соответствии с заданной программой логический микроконтроллер обрабатывает данные, поступающие с модулей входов, и отправляет управляющие команды на исполнительные механизмы, которые соединяются с ПЛК посредством модулей связи. 6) ПЛК являются устройствами реального времени.  7)
7)
Понятное описание принципа действия контроллера представлено на следующем англоязычном видео:
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
• микроконтроллера (однокристального компьютера), микросхемы предназначенной для управления электронными устройствами, областью применения ПЛК обычно являются автоматизированные процессы промышленного производства, в контексте производственного предприятия;
• компьютеров, ПЛК имеют развитые устройства ввода-вывода сигналов датчиков и исполнительных механизмов в противовес слабым возможностям ввода-вывода управления (клавиатура, мышь, монитор и т. п.);
В данном видео демонстируется управление станком резки металла посредством ПЛК:
Применение
Наглядное представление сфер применения контроллеров:
Программируемые логические контроллеры
Автоматические системы управления невозможно представить без различных технических устройств. Среди них, ведущее место занимают программируемые логические контроллеры, представляющие собой комплекс микропроцессоров. С их помощью осуществляется сбор, преобразование, обработка и хранение информации. На основании полученных данных вырабатываются команды управления.
Принцип работы контроллеров
Контроллеры оборудованы большим количеством входов и выходов, куда подключаются всевозможные ключи, датчики и прочие исполнительные механизмы. В целом, все эти элементы соединяются с объектом управления и производят работу в реальном времени.
Работа контроллера, в целом, очень похожа на действие обыкновенных микропроцессоров. Для каждого универсального логического контроллера предусмотрено две части программного обеспечения. Одна из них является системной частью и, фактически, представляет собой операционную систему. Она позволяет осуществлять управление всеми узлами контроллера, выполнять внутреннюю диагностику и обеспечивать взаимосвязь всех составных частей. Операционная система располагается в собственной памяти, находящейся в центральном процессоре, и находится в постоянной готовности к работе.

Вторая часть включает в себя прикладную программу, которая занимается непосредственным управлением. Она может быть настроена на любые необходимые действия, после завершения которых управление вновь переходит на системный уровень.
Общая схема контроллера
Основными элементами схемы контроллера являются входы и выходы. Дискретный вход устройства обеспечивает прием одного бинарного электрического сигнала во включенном или выключенном состоянии. Как правило, это стандартные сигналы с постоянным током в 24 вольта.
Аналоговые электрические сигналы отражают физический уровень тока или напряжения в данный промежуток времени. Они связаны с такими показателями, как скорость, температура, давление, масса и прочие.
Программируемые логические контроллеры позволяют осуществлять аналого-цифровое преобразование входных сигналов. Это приводит к образованию дискретной переменной, имеющей определенную разрядность. В большинстве случаев применяются преобразователи от 8 до 12 разрядов, обеспечивающих необходимую точность управления всеми процессами.
Все модули с аналоговыми вводами имеют многоканальную конструкцию. Вход аналого-цифрового преобразователя подключается к необходимому модулю с помощью входного коммутатора. Таким образом, становится возможным выполнить все требования и запросы систем, связанных с промышленной автоматикой.
Принцип работы и основы программирования ПЛК
Программируемые логические контроллеры (ПЛК)
До появления твердотельных логических схем разработка систем логического управления основывались на электромеханических реле. По сей день реле не устарели в своем предназначении, но все же в некоторых своих прежних функциях они заменены контроллером.
В современной промышленности существует большое количество различных систем и процессов, требующих автоматизации, но теперь такие системы редко проектируются из реле. Современные производственные процессы нуждаются в устройстве, которое запрограммировано на выполнение различных логических функций.
В конце 1960-х годов американская компания «Bedford Associates» разработала компьютерное устройство, названное MODICON (Modular Digital Controller). Позже название устройства стало названием подразделения компании, спроектировавшей, сделавшей и продавшей его.
Другие компании разработали собственные версии этого устройства, и, в конце концов, оно стало известно как ПЛК, или программируемый логический контроллер. Целью программируемого контроллера, способного имитировать работу большого количества реле, была замена электромеханических реле на логические элементы.

ПЛК имеет набор входных клемм, с помощью которых можно контролировать состояние датчиков и выключателей. Также имеются выходные клеммы, которые сообщают «высокий» или «низкий» сигнал индикаторам питания, электромагнитным клапанам, контакторам, небольшим двигателям и другим самоконтролируемым устройствам.
ПЛК легки в программировании, так как их программный язык напоминает логику работы реле. Так обычный промышленный электрик или инженер-электрик, привыкший читать схемы релейной логики, будет чувствовать себя комфортно и при программировании ПЛК на выполнение тех же функций.
Подключение сигналов и стандартное программирование несколько отличаются у разных моделей ПЛК, но они достаточно схожи, что позволяет разместить здесь «общее» введение в программирование этого устройства.
Следующая иллюстрация показывает простой ПЛК, а точнее то, как он может выглядеть спереди. Две винтовые клеммы, обеспечивающие подключение для внутренних цепей ПЛК напряженим до 120 В переменного тока, помечены L1 и L2.
Шесть винтовых клемм, расположенных с левой стороны, обеспечивают подключение для входных устройств. Каждая клемма представляет свой входной канал (Х). Винтовая клемма («общее» подключение ) расположенная в левом нижнем углу обычно подключается к L2 (нейтральная) источника тока напряжением 120 В переменного тока.
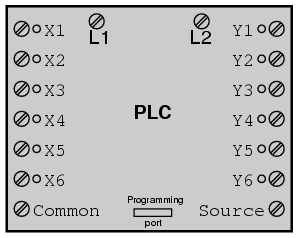
Внутри корпуса ПЛК, связывающего каждую входную клемму с общей клеммой, находится оптоизолятор устройства (светодиод), который обеспечивает электрически изолированный «высокий» сигнал для схемы компьютера ( фототранзистор интерпретирует свет светодиода), когда 120-тивольтный переменный ток устанавливается между соответствующей входной клеммой и общей клеммой. Светодиод на передней панели ПЛК дает возможность понять, какой вход находится под напряжением:
Выходные сигналы генерируются компьютерной схемотехникой ПЛК, активируя переключающее устройство (транзистор, тиристор или даже электромеханическое реле) и связывая клемму «Источник» (правый нижний угол) с любым помеченным буквой Y выходом. Клемма «Источник» обычно связывается с L1. Так же, как и каждый вход, каждый выход, находящий под напряжением, отмечается с помощью светодиода:
Таким образом, ПЛК может подключаться к любым устройствам, таким как переключатели и электромагниты.
Основы программирования ПЛК
Современная логика системы управления установлена в ПЛК посредством компьютерной программы. Эта программа определяет, какие выходы находятся под напряжением и при каких входных условиях. Хотя сама программа напоминают схему логики реле, в ней не существует никаких контактов переключателя или катушек реле, действующих внутри ПЛК для создания связей между входом и выходом. Эти контакты и катушки мнимые. Программа пишется и просматривается с помощью персонального компьютера, подключенного к порту программирования ПЛК.
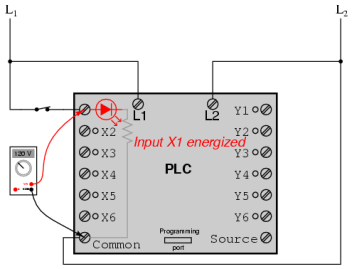
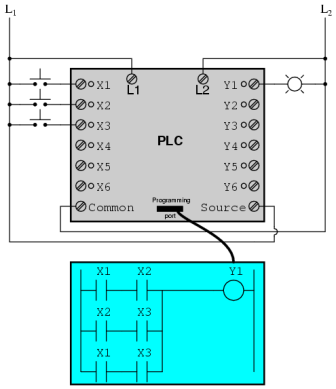
Рассмотрим следующую схему и программу ПЛК:
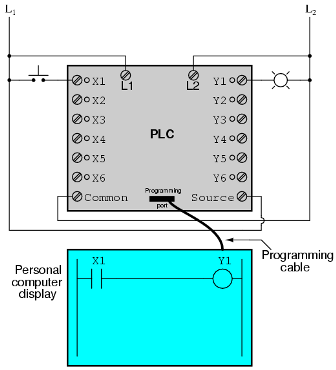
Когда кнопочный переключатель не задействован (находится в не нажатом состоянии), сигнал не посылается на вход Х1. В соответствие с программой, которая показывает «открытый» вход Х1, сигнал не будет посылаться и на выход Y1. Таким образом, выход Y1 останется обесточенным, а индикатор, подключенный к нему, погасшим.
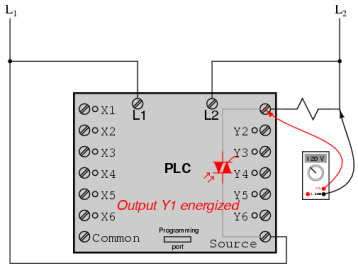
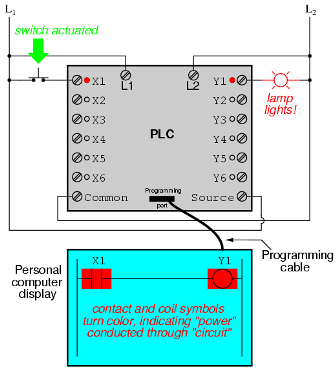
Если кнопочный переключатель нажат, сигнал будет отправлен к входу Х1. Все контакты Х1 в программе примут активированное состояние, как будто они являются контактами реле, активированными посредством подачи напряжения катушке реле, названной Х1. В этом случае открытый контакт Х1 будет «закрыт» и отправит сигнал к катушке Y1. Когда катушка Y1 будет находиться под напряжением, выход Y1 осветится лампочкой, подключенной к нему.
Не менее важно понять, что компьютер, используемый для написания и редактирования программы, не нужен для дальнейшего использования ПЛК. После того, как программа была загружена в программируемый контроллер, компьютер можно отключить, и ПЛК самостоятельно будет выполнять программные команды. Мы включаем монитор персонального компьютера в иллюстрации для того, чтобы вы поняли связь между реальными условиями (замыкание переключателя и статусы лампы) и статусы программы (сигналы через виртуальные контакты и виртуальные катушки).
Истинная мощь и универсальность ПЛК раскрывается, когда мы хотим изменить поведение системы управления. Поскольку ПЛК является программируемым устройством, мы можем изменить, команды, которые мы задали, без перенастройки компонентов, подключенных к нему. Предположим, что мы решили функцию «переключатель – лампочка» перепрограммировать наоборот: нажать кнопку, чтобы выключить лампочку, и отпустить ее, чтобы включить.
Решение такой задачи в реальных условиях заключается в том, что выключатель, «открытый» при нормальных условиях, заменяется на «закрытый». Программное ее решение – это изменение программы так, чтобы контакт Х1 при нормальных условиях был «закрыт», а не «открыт».
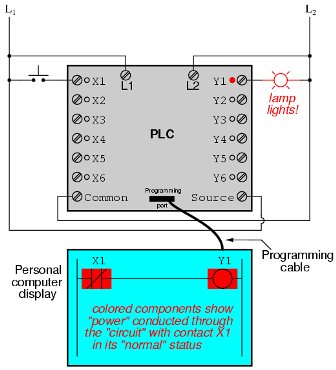
На следующем изображении вы увидите уже измененную программу, при не активизированном переключателе:
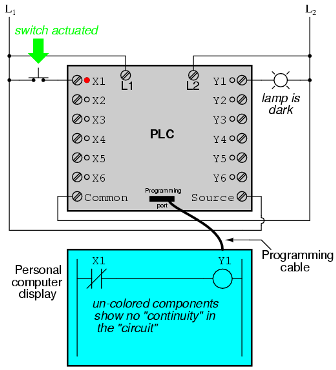
А здесь переключатель активизирован:
Одним из преимуществ реализации логического контроля в программном обеспечении, в отличие от контроля с помощью оборудования, является то, что входные сигналы могут быть использованы такое количество раз, какое потребуется. Например, рассмотрим схему и программу, разработанной для включения лампочки, если хотя бы два из трех переключателей активизированы одновременно:
Чтобы построить аналогичную схему, используя реле, потребуются три реле с двумя открытыми контактами при нормальных условиях, каждый из которых должен быть использован. Однако используя ПЛК, мы можем без добавления дополнительного оборудования запрограммировать столько контактов для каждого «Х» входа, сколько нам хотелось бы (каждый вход и выход должен занимать не больше, чем 1 бит в цифровой памяти ПЛК) и вызывать их столько раз, сколько необходимо.
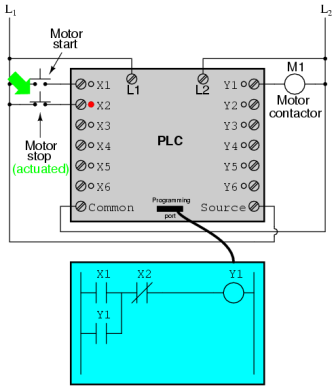
Кроме того, так как каждый выход ПЛК занимает не более одного бита в его памяти, мы можем вносить контакты в программу, приводя Y выход в не активизированное состояние. Для примера возьмем схему двигателя с системой контроля начала движения и остановки:
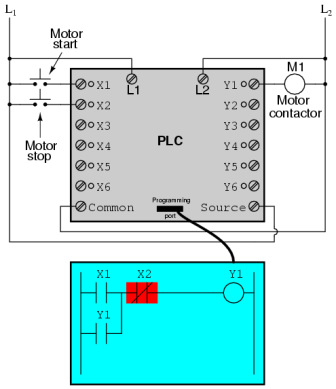
Если нажать кнопку «Старт», то по «закрытому» контакту Х1 пройдет ток ток и он отправит 120 В переменного токак к контактору двигателя. Параллельный контакт Y1 также «закроется», тем самым замкнув цепь:
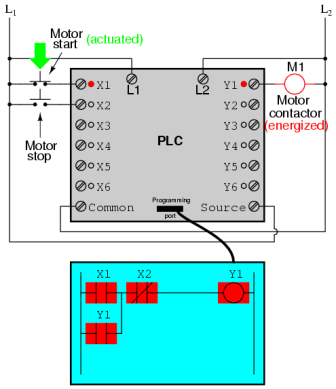
Если мы теперь нажмем кнопку «Старт», контакт Х1 перейдет в «открытое» состояние, но двигатель будет продолжать работать, потому что замкнутый контакт Y1 все еще будет держать катушку под напряжением:
Чтобы остановить двигатель, нужно быстро нажать кнопку «Стоп», которая сообщит напряжение входу Х1 и «открытому» контакту, что приведет к прекращению подачи напряжения к катушке Y1:
Когда вы нажали кнопку «Стоп», вход Х1 остался без напряжения, вернув тем самым контакт Х1 в его нормальное «закрытое» состояние. Двигатель ни при каких условиях не станет работать снова, пока вы снова не нажмете кнопку «Старт», потому что печать в контакте Y1 была потеряна:
Очень важна отказоустойчивая модель устройств контроля ПЛК, так же, как и в устройствах контроля электромеханического реле. Нужно всегда учитывать влияние ошибочно «открытого» контакта на работу системы. Так, например, в нашем случае, если контакт Х2 будет ошибочно «открыт», то не будет никакой возможности остановить двигатель!
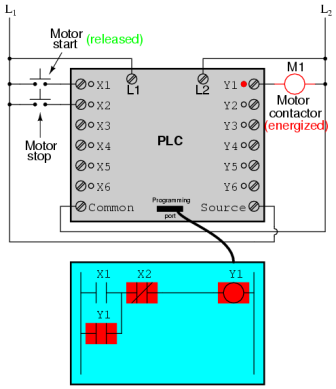
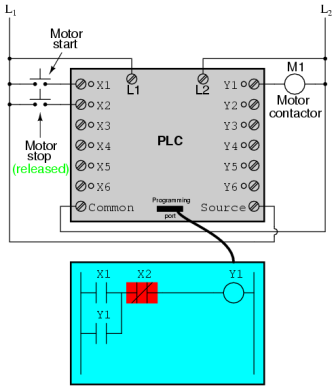
Решением этой проблемы является перепрограммирование контакта Х2 внутри ПЛК и фактическое нажатие кнопки «Стоп»:
Когда кнопка «Стоп» не нажата, вход ПЛК Х2 находится под напряжением, т.е. контакт Х2 «закрыт». Это позволяет двигателю начать работу, когда контакту Х1 сообщается ток, и продолжать работу, когда кнопка «Старт» отпущена. Когда вы нажимаете кнопку «Стоп», контакт Х2 переходит в «открытое» состояние и двигатель прекращает работу. Таким образом, вы можете увидеть, что функциональной разницы между этой и предыдущей моделью нет.
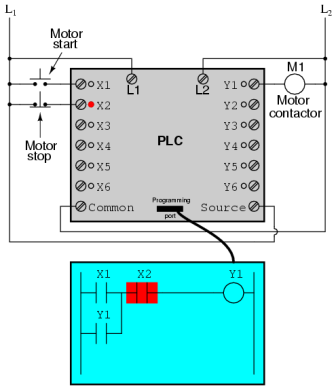
Тем не менее, если входной контакт Х2 был ошибочно «открыт», вход Х2 может быть остановлен нажатием кнопки «Стоп». В результате двигатель немедленно отключается. Эта модель безопаснее, чем предыдущая, где нажатие кнопки «Стоп» сделает невозможным остановку двигателя.
В дополнение к входам (Х) и выходам (Y) в ПЛК есть возможность использовать «внутренние контакты и катушки. Они используются так же, как и промежуточные реле, применяемые в стандартных релейных схемах.
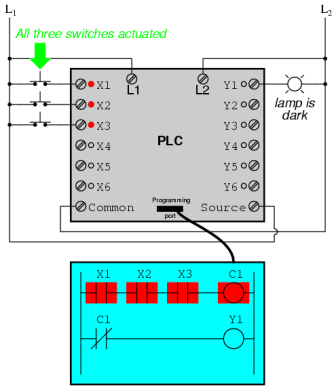
Чтобы понять принцип работы «внутренних» схем и контактов, рассмотрим следующую схему и программу, разработанную по принципу трех входов логической функции AND:
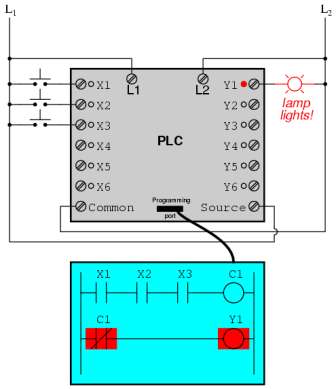
В данной схеме, лампа горит, до тех пора пока какая-либо из кнопок не нажата. Для того чтобы выключить лампу следует нажать все три кнопки:
В этой статье, посвященной программируемым логическим контроллерам, иллюстрирована лишь небольшая выборка их возможностей. Как компьютер ПЛК может выполнять и другие расширенные функции с гораздо большей точностью и надежностью, чем при использовании электромеханических логических устройств. Большинство ПЛК имеют больше шести входов и выходов. Следующая иллюстрация показывает один из ПЛК компании Allen-Bradley:

С модулями, каждый из которых имеет 16 входов и выходов, этот ПЛК имеет возможность управлять десятком устройств. Помещенный в шкаф управления ПЛК занимает мало места (для электромеханических реле, выполняющих те же функции, понадобилось бы гораздо больше свободного пространства).

Structured Text
Книга «Изучаем Structured Text МЭК 61131-3»: Ссылка на книгу



