Робот LEGO MINDSTORMS EV3 и NXT инструкции
![]()
Энтузиаст моделирования Crabfu делает замечательных трехногих крабов. Последняя версия, которая сейчас на вас смотрит с фотографии сделана из полиморфа, специального плас.
![]()
Моё имя Пэл. Я сделан из стали
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
| На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них. Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3). Внешний вид конструктора LEGO Mindstorm EV3 версии 31313 и 45544 :
| |||


Внимание! Публикуем удобный комплект Инструкций по сборке роботов лего EVO 3 и программ для программирования.
В этом же наборе есть робот пятиминутка ев3
Читайте Планирование уроков робототехники в школе (для учеников 6-8 класса). Расчитано на 34 часа 2018-2019 учебный год,
имеются ссылки на дополнительные материалы учителю: видео, инструкции, план построения урока по ФГОС!
Развитие промышленных роботов в автомобилестроении. Часть 1

Со времен изобретения автомобилей, люди пытаются оптимизировать все процессы в производстве машин. Ведь чем быстрей и проще автомобиль будет собран и выпущен на рынок, тем быстрей производитель получит свой Доллар/Рубль/Евро.
Роботы внедряются в производство постепенно и обдуманно. Они имеют большое преимущество перед любым человеком в силе и постоянстве, могут работать 3 смены без остановки на выходные, обеденный перерыв или отпуск. Что очень важно для беспрерывного производства.
Добро пожаловать под кат, где много картинок и видео.
Многие уже видели видео о том как два робота крутят в разные стороны телевизоры. Именно такие роботы широко применяются на линиях сборки автомобилей.
На каких же этапах роботы помогают быстрей выпустить авто с конвейера? Сегодня я хотел бы описать первый этап производства автомобилей и участия в нем промышленных роботов.
ЭТАП 1: СБОРКА И СВАРКА КУЗОВА
Процесс производства автомобиля начинается с изготовления и сборки кузова. Практически все остальные составляющие автомобиля производят компании-поставщики и присылают их на сборочную линию.
На заводе-изготовителе все начинается со штамповки деталей с последующей их сборкой, сваркой и склейкой.
Штамповка/изготовление кузовных деталей

Вся задача персонала на линии штамповки сводится к перемещению деталей между прессами, проверке качества, складированием готовых изделий и контролю прессов. Работа монотонная и опасная. Пресс производит сильные вибрации, человек может не успеть убрать руку, выпадающая деталь может упасть на ноги и т.д. Развивать тему «как убиться об промышленный пресс» можно долго.

Линии с автоматической передачей деталей
Чтобы снизить травмоопасность, или же расходы на персонал, на заводах начали устанавливать автоматические линии на этапе штамповки деталей.
Задачи довольно простые, но из-за громоздкости прессов и миниатюрности деталей реализовать изначально замену людей было сложно и громоздко.
Роботы
При штамповке преимущество робота в том, что он не бросит заготовку, а очень точно ее положит. Вовремя уберет руку, т.к. синхронизирован со штампом.
Сборка и сварка
Сварка — очень опасный и вредный для здоровья процесс, поэтому имеет смысл поставить на место человека робота, который будет держать ровно сварочный шов и не перерасходует сварочного материала. На заводе зоны сборки и сварки очень ограниченны и люди не имеют свободного доступа на эти территории.
На этапе проверки качества деталей стоят люди. Лично меня радует тот факт, что без людей обойтись пока невозможно.
К сожалению, или скорее к счастью на этом этапе Людей заменили очень давно. Я даже не нашел подходящей картинки. Нашел только для сборки. Как видно на видео, люди делали сварку во много маленьких этапов, чтобы ускорить процесс изготовления деталей.
Приспособления и Роботы
Роботы делают свою работу совместно с приспособлениями, которые например подставляют нужные детали, держат вместе всю конструкцию и отодвигают сваренный корпус автомобиля. Вся такая работа синхронизирована.
Изготовление комплектующих из углепластика
Совсем недавно BMW запустили в продажу автомобили серий i3 и i8. В скором времени будут i1 и i5. Особенности автомобилей в том, что они частично, или полностью электрические и их кузова изготовлены из углепластика. Технология производства таких деталей нова, поэтому люди в основном выполняют контроль процессов и качества.

Изготовление деталей из углепластика.
Склека и пайка кузова
Заключение:
В чем же заключается развитие?
Самое главное это то, что роботов уже очень давно внедрили в производство и все время совершенствуют под разные задачи. Робот может залезть в достаточно (деликатные) узкие места с тяжелым грузом, при этом не задеть обшивку и не удариться головой.
Хочу стать инженером и собрать робота. У меня получится?
Можно подумать, что робототехника — занятие для умников и выпускников физтеха, но это не так. На самом деле простых роботов строят даже младшие школьники, поэтому вам это тоже под силу. Вместе с благотворительным фондом Олега Дерипаски «Вольное дело», реализующим программу по робототехнике для школьников, подростков и студентов, мы сделали простой гид для начинающих инженеров (впрочем, взрослым он тоже вполне может пригодиться). Объясняем, как собрать своего первого робота.
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей. Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.

Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Если у вас нет профильного образования или опытного наставника, который подробно объяснит, что именно и в какой последовательности устанавливать (и как пользоваться паяльником!), готовьтесь к долгой и кропотливой работе: придется перерыть интернет вдоль и поперек и испортить множество деталей.
Я в ужасе и собираюсь передумать. Нельзя попроще?
Можно. Специально для тех, кто никогда не держал в руках паяльник, но очень хочет попробовать себя в робототехнике, существуют специальные наборы-конструкторы, позволяющие сделать всё то же самое, но быстрее. Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Составы наборов могут быть очень разными, но в каждом есть готовая печатная плата с уже установленным микроконтроллером и всеми дополнительными деталями, которые нужны для решения простых типовых задач. Обычно плату можно напрямую подключить к компьютеру через USB. А дальше среда разработки от производителя поможет сразу же сделать первые шаги в программировании роботов. Например, заставить мигать лампочку на плате.
Теперь всё зависит от вас. Можно, используя готовую плату, реализовать собственный несложный проект: например, сделать машинку, которая движется и останавливается по команде, или гирлянду для новогодней елки. Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
Участники программы «Робототехника», которую поддерживает фонд Олега Дерипаски «Вольное дело», уже через несколько лет обучения могут создавать куда более сложные проекты и придумывают инженерные решения для самых разных задач. Например, разрабатывают системы для автоматической сортировки мусора. Если вам кажется, что всё это очень сложно, вы правы, но научиться этому может каждый.
У меня в школе была двойка по физике, и вообще я гуманитарий. Мне нужно что-то выучить, прежде чем приступать?
Штурмовать учебники необязательно. Конечно, школьная физика пригодилась бы, но если вы ее забыли, не переживайте — вспомните по ходу дела. Для начала просто погуглите, что такое ток, сопротивление, закон Ома, конденсатор, транзистор — пара десятков статей дадут вам базовые представления о радиотехнике, и этого хватит на первое время. Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
А программировать надо уметь?
Если умеете, создание первого робота окажется, возможно, даже слишком легким делом. Если не умеете — отличный повод научиться. Дело в том, что программирование робота — штука очень наглядная: вот вы написали код и сразу же загорелась лампочка. Вам нужно, чтобы ваш робот разворачивался, когда до стены осталось меньше 5 см, значит, в программе надо прописать такое условие, всё логично. Именно поэтому детей часто начинают учить программированию на примере робототехники: здесь вместо скучных абстракций сразу получается осязаемый результат в реальном мире. На этом принципе строится обучение по программе «Робототехника». Все участники сразу же могут применить полученные знания на практике.
Меня случайно не убьет током?
Самая вероятная неприятность — некоторое количество испорченных деталей, которые вы попытаетесь подсоединить не так и не туда. Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Мой робот сможет защитить меня от врагов? Ну или хотя бы тапочки принести?
Самый первый — вряд ли. Точнее, нет ничего невозможного, но для начала лучше поставить перед собой цель попроще. Например, на базе того же Arduino можно собрать самых разных движущихся роботов: они могут ездить просто вперед-назад, по сложной заданной траектории или по нарисованной линии. Робот, который самостоятельно объезжает препятствия или как-то еще меняет свое поведение при приближении к разным объектам, тоже посильная задача. Еще первый робот вполне сможет включать и выключать что-нибудь, ориентируясь на уровень освещенности, совершать какие-то действия в определенный момент, заданный таймером, или по нажатию кнопки.
Умение собирать роботов как-то пригодится мне в жизни?
Да, еще как. Вы неизбежно научитесь программировать. Причем будете в состоянии не просто писать код, который что-то как-то делает, но и понимать всю цепочку, по которой набранные вами на клавиатуре символы преобразуются в действия целого механизма. Уметь программировать в наше время почти так же полезно, как знать английский язык: пригодится, даже если вы маркетолог или продавец мороженого.
Знание робототехники при желании позволит вам здорово усовершенствовать быт и даже сделать свое жилище «умным», не покупая дорогих готовых решений. Световой будильник? Запросто. Лампы с датчиками движения? Да легко. Чайник, который начинает кипятиться, получив СМС, и передает кондиционеру сигнал охлаждать, а пылесосу пылесосить? Не так легко, но вполне реализуемо.
Где можно узнать больше о роботах?
Можно пройти один из многочисленных, в том числе совершенно бесплатных онлайн-курсов. Можно выбрать курс, посвященный Arduino, — как, например, этот от МФТИ, или начать с Lego. А можно не привязываться к конкретной платформе и учиться робототехнике в целом — например, на этом курсе от Бауманки. Ну а если вы знаете английский, буквально вся Coursera с программами по робототехнике от ведущих мировых университетов к вашим услугам.
А если мне понравится и я захочу сделать это своей профессией? Куда податься?
Самое очевидное решение — в программисты. Причем не обязательно туда, где работают непосредственно с «железом»: навыки, полученные во время занятий робототехникой, пригодятся в любой сфере — от промышленного до веб-программирования.
Если возникнет желание связать свою дальнейшую судьбу именно с роботами, придется получить соответствующее высшее образование. Специальность «Робототехника и мехатроника» уже появилась во многих технических вузах — в Москве это МГТУ имени Баумана, МИФИ, МЭИ, МИРЭА. Подойдет и факультет радиотехники: большинство нынешних специалистов по робототехнике получали именно такое образование.
Создаем робота в домашних условиях
Наверняка, насмотревшись фильмов про роботов, тебе не раз хотелось построить своего боевого товарища, но ты не знал с чего начать. Конечно, у тебя не получится построить двуногого терминатора, но мы и не стремимся к этому. Собрать простого робота может любой, кто умеет правильно держать паяльник в руках и для этого не нужно глубоких знаний, хотя они и не помешают. Любительское роботостроение мало чем отличается от схемотехники, только гораздо интереснее, потому что тут так же затронуты такие области, как механика и программирование. Все компоненты легкодоступны и стоят не так уж и дорого. Так что прогресс не стоит на месте, и мы будем его использовать в свою пользу.
Введение
Итак. Что же такое робот? В большинстве случаев это автоматическое устройство, которое реагирует на какие-либо действия окружающей среды. Роботы могут управляться человеком или выполнять заранее запрограммированные действия. Обычно на роботе располагают разнообразные датчики (расстояния, угла поворота, ускорения), видеокамеры, манипуляторы. Электронная часть робота состоит из микроконтроллера (МК) – микросхема, в которую заключён процессор, тактовый генератор, различная периферия, оперативная и постоянная память. В мире существует огромное количество разнообразных микроконтроллеров для разных областей применения и на их основе можно собирать мощных роботов. Для любительских построек широкое применение нашли микроконтроллеры AVR. Они, на сегодняшний день, самые доступные и в интернете можно найти много примеров на основе этих МК. Чтобы работать с микроконтроллерами тебе нужно уметь программировать на ассемблере или на Cи и иметь начальные знания в цифровой и аналоговой электронике. В нашем проекте мы будем использовать Cи. Программирование для МК мало чем отличается от программирования на компьютере, синтаксис языка такой же, большинство функций практически ничем не отличаются, а новые довольно легко освоить и ими удобно пользоваться.
Что нам нужно
Для начала наш робот будет уметь просто объезжать препятствия, то есть повторять нормальное поведение большинства животных в природе. Всё что нам потребуется для постройки такого робота можно будет найти в радиотехнических магазинах. Решим, как наш робот будет передвигаться. Самым удачным я считаю гусеницы, которые применяются в танках, это наиболее удобное решение, потому что гусеницы имеют большую проходимость, чем колёса машины и ими удобнее управлять (для поворота достаточно вращать гусеницы в разные стороны). Поэтому тебе понадобится любой игрушечный танк, у которого гусеницы вращаются независимо друг от друга, такой можно купить в любом магазине игрушек по разумной цене. От этого танка тебе понадобится только платформа с гусеницами и моторы с редукторами, остальное ты можешь смело открутить и выкинуть. Так же нам потребуется микроконтроллер, мой выбор пал на ATmega16 – у него достаточно портов для подключения датчиков и периферии и вообще он довольно удобный. Ещё тебе потребуется закупить немного радиодеталей, паяльник, мультиметр.
Делаем плату с МК
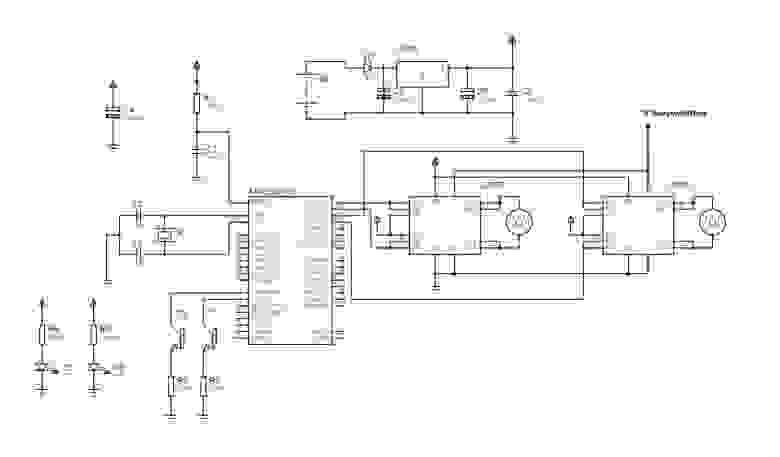
Схема робота
В нашем случае микроконтроллер будет выполнять функции мозга, но начнём мы не с него, а с питания мозга робота. Правильное питание – залог здоровья, поэтому мы начнём с того, как правильно кормить нашего робота, потому что на этом обычно ошибаются начинающие роботостроители. А для того, чтобы наш робот работал нормально нужно использовать стабилизатор напряжения. Я предпочитаю микросхему L7805 – она предназначена, чтобы на выходе выдавать стабильное напряжение 5В, которое и нужно нашему микроконтроллеру. Но из-за того, что падение напряжения на этой микросхеме составляет порядка 2,5В к нему нужно подавать минимум 7,5В. Вместе с этим стабилизатором используются электролитические конденсаторы, чтобы сгладить пульсации напряжения и в цепь обязательно включают диод, для защиты от переполюсовки.
Теперь мы можем заняться нашим микроконтроллером. Корпус у МК — DIP (так удобнее паять) и имеет сорок выводов. На борту имеется АЦП, ШИМ, USART и много другого, что мы пока использовать не будем. Рассмотрим несколько важных узлов. Вывод RESET (9-ая нога МК) подтянут резистором R1 к «плюсу» источника питания – это нужно делать обязательно! Иначе твой МК может непреднамеренно сбрасываться или, проще говоря – глючить. Так же желательной мерой, но не обязательной является подключение RESET’а через керамический конденсатор C1 к «земле». На схеме ты так же можешь увидеть электролит на 1000 мкФ, он спасает от провалов напряжения при работе двигателей, что тоже благоприятно скажется на работе микроконтроллера. Кварцевый резонатор X1 и конденсаторы C2, C3 нужно располагать как можно ближе к выводам XTAL1 и XTAL2.
О том, как прошивать МК, я рассказывать не буду, так как об этом можно прочитать в интернете. Писать программу мы будем на Cи, в качестве среды программирования я выбрал CodeVisionAVR. Это довольно удобная среда и полезна новичкам, потому что имеет встроенный мастер создания кода.

Плата моего робота
Управление двигателями
Не менее важным компонентом в нашем роботе является драйвер двигателей, который облегчает нам задачу в управлении им. Никогда и ни в коем случае нельзя подключать двигатели напрямую к МК! Вообще мощными нагрузками нельзя управлять с микроконтроллера напрямую, иначе он сгорит. Пользуйтесь ключевыми транзисторами. Для нашего случая есть специальная микросхема – L293D. В подобных несложных проектах всегда старайтесь использовать именно эту микросхему с индексом «D», так как она имеет встроенные диоды для защиты от перегрузок. Этой микросхемой очень легко управлять и её просто достать в радиотехнических магазинах. Она выпускается в двух корпусах DIP и SOIC. Мы будем использовать в корпусе DIP из-за удобства монтажа на плате. L293D имеет раздельное питание двигателей и логики. Поэтому саму микросхему мы будем питать от стабилизатора (вход VSS), а двигатели напрямую от аккумуляторов (вход VS). L293D выдерживает нагрузку 600 мА на каждый канал, а этих каналов у неё два, то есть к одной микросхеме можно подключить два двигателя. Но, чтобы перестраховаться, мы объединим каналы, и тогда потребуется по одной микре на каждый двигатель. Отсюда следует, что L293D сможет выдержать 1.2 А. Чтобы этого добиться нужно объединить ноги микры, как показано на схеме. Микросхема работает следующим образом: когда на IN1 и IN2 подаётся логический «0», а на IN3 и IN4 логическая единица, то двигатель вращается в одну сторону, а если инвертировать сигналы – подать логический ноль, тогда двигатель начнёт вращаться в другую сторону. Выводы EN1 и EN2 отвечают за включение каждого канала. Их мы соединяем и подключаем к «плюсу» питания от стабилизатора. Так как микросхема греется во время работы, а установка радиаторов проблематична на этот тип корпуса, то отвод тепла обеспечивается ногами GND — их лучше распаивать на широкой контактной площадке. Вот и всё, что на первое время тебе нужно знать о драйверах двигателей.
Датчики препятствий
Чтобы наш робот мог ориентироваться и не врезался во всё, мы установим на него два инфракрасных датчика. Самый простейший датчик состоит из ик-диода, который излучает в инфракрасном спектре и фототранзистор, который будет принимать сигнал с ик-диода. Принцип такой: когда перед датчиком нет преграды, то ик-лучи не попадают на фототранзистор и он не открывается. Если перед датчиком препятствие, тогда лучи от него отражаются и попадают на транзистор – он открывается и начинает течь ток. Недостаток таких датчиков в том, что они могут по-разному реагировать на различные поверхности и не защищены от помех — от посторонних сигналов других устройств датчик, случайно, может сработать. От помех может защитить модулирование сигнала, но пока мы этим заморачиватся не будем. Для начала, и этого хватит.
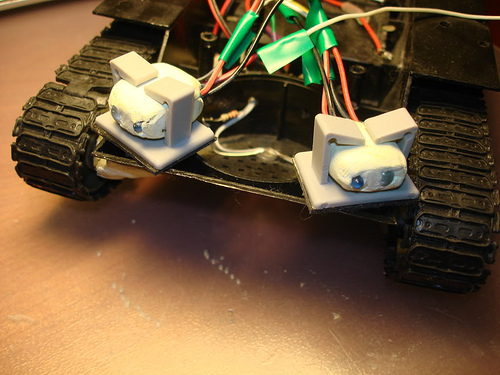
Первый вариант датчиков моего робота
Прошивка робота
Чтобы оживить робота, для него нужно написать прошивку, то есть программу, которая бы снимала показания с датчиков и управляла двигателями. Моя программа наиболее проста, она не содержит сложных конструкций и всем будет понятна. Следующие две строки подключают заголовочные файлы для нашего микроконтроллера и команды для формирования задержек:
Следующие строки условные, потому что значения PORTC зависят от того, как ты подключил драйвер двигателей к своему микроконтроллеру:
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
Значение 0xFF означает, что на выходе будет лог. «1», а 0x00 – лог. «0».
Следующей конструкцией мы проверяем, есть ли перед роботом препятствие и с какой оно стороны:
Если на фототранзистор попадает свет от ик-диода, то на ноге микроконтроллера устанавливается лог. «0» и робот начинает движение назад, чтобы отъехать от препятствия, потом разворачивается, чтобы снова не столкнуться с преградой и затем опять едет вперёд. Так как у нас два датчика, то мы проверяем наличие преграды два раза – справа и слева и потому можем узнать с какой стороны препятствие. Команда «delay_ms(1000)» указывает на то, что пройдёт одна секунда, прежде чем начнёт выполняться следующая команда.
Заключение
Я рассмотрел большинство аспектов, которые помогут тебе собрать твоего первого робота. Но на этом робототехника не заканчивается. Если ты соберёшь этого робота, то у тебя появится куча возможностей для его расширения. Можно усовершенствовать алгоритм робота, как например, что делать, если препятствие не с какой-то стороны, а прямо перед роботом. Так же не помешает установить энкодер – простое устройство, которое поможет точно располагать и знать расположение твоего робота в пространстве. Для наглядности возможна установка цветного или монохромного дисплея, который может показывать полезную информацию – уровень заряда аккумулятора, расстояние до препятствия, различную отладочную информацию. Не помешает и усовершенствование датчиков – установка TSOP (это ик-приёмники, которые воспринимают сигнал только определённой частоты) вместо обычных фототранзисторов. Помимо инфракрасных датчиков существуют ультразвуковые, стоят подороже, и тоже не лишены недостатков, но в последнее время набирают популярность у роботостроителей. Для того, чтобы робот мог реагировать на звук, было бы неплохо установить микрофоны с усилителем. Но по-настоящему интересным, я считаю, установка камеры и программирование на её основе машинного зрения. Есть набор специальных библиотек OpenCV, с помощью которых можно запрограммировать распознавание лиц, движения по цветным маякам и много всего интересного. Всё зависит только от твоей фантазии и умений.
Список компонентов:
Код прошивки:
void main(void)
<
//Настраиваем порты на вход
//Через эти порты мы получаем сигналы от датчиков
DDRB=0x00;
//Включаем подтягивающие резисторы
PORTB=0xFF;
//Настраиваем порты на выход
//Через эти порты мы управляем двигателями
DDRC=0xFF;
//Главный цикл программы. Здесь мы считываем значения с датчиков
//и управляем двигателями
while (1)
<
//Едем вперёд
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
if (!(PINB & (1
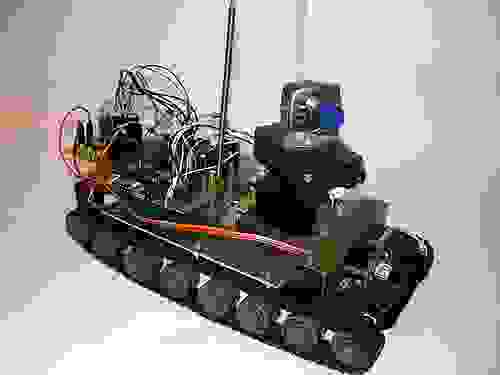
О моём роботе
В данный момент мой робот практически завершён. 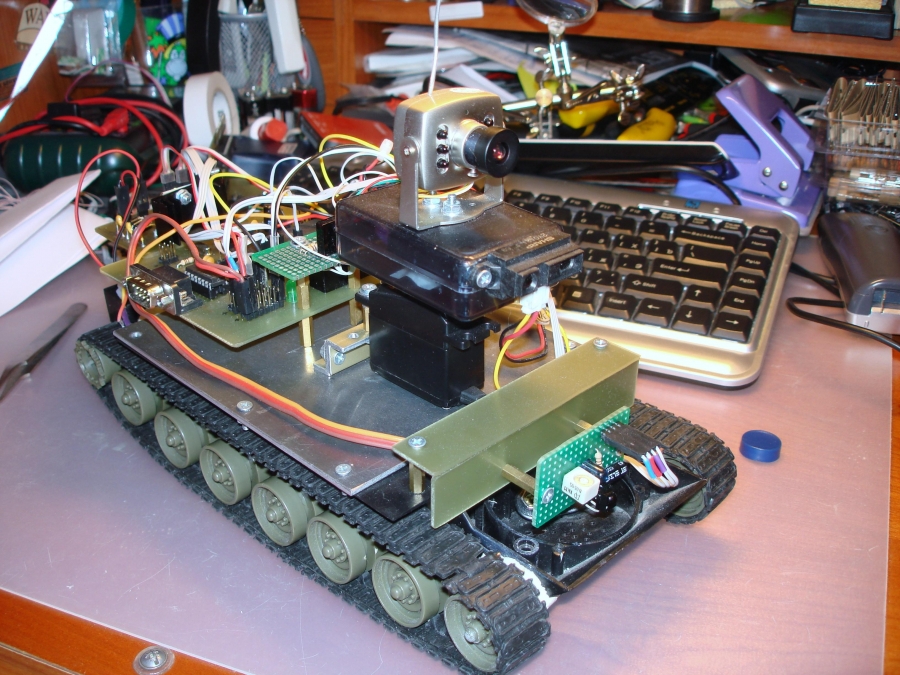
На нём установлена беспроводная камера, датчик расстояния (и камера и этот датчик установлены на поворотной башне), датчик препятствия, энкодер, приёмник сигналов с пульта и интерфейс RS-232 для соединения с компьютером. Работает в двух режимах: автономном и ручном (принимает сигналы управления с пульта ДУ), камера также может включаться/выключаться дистанционно или самим роботом для экономии заряда батарей. Пишу прошивку для охраны квартиры (передача изображения на компьютер, обнаружение движений, объезд помещения).
По пожеланиям выкладываю видео:
UPD. Перезалил фотографии и сделал небольшие поправки в тексте.
Статья была опубликована мною в журнале «Хакер» за август 2009 года.



