Моделирование и текстурирование Mini Cooper в Cinema 4D
Привет DTF! Хочу поделиться с вами небольшим опытом, как у меня впервые получилось замоделить автомобиль.
Нахлынул хайп NFT токенов, у меня загорелись глаза сделать тоже что то интересное и дропнуть на какой нибудь площадке. Давно хотел замоделить машинку, появилась идея в реализации, мотивация, интерес, в общем паззл сложился и я приступил.
Важный момент! Все мои знания, как моделить тачки, складывались на основе спид артов и туторов с ютуба. Поэтому не воспринимайте мой лонгрид, как инструкцию, я профан и это моя первая тачка, прошу понять, чуваков в теме — посмеяться)
С автомобилем определиться не было каких то сложностей, очень уж я люблю мини куперы. За основу решил взять модели 70-80 годов. Скачал несколько «типа» чертежей. Гугл по быстрому поиску не хотел мне выдавать чертежи, мейби где то и валяются, черт знает, я думаю, мне хватит и обводок. А если не хватит, ну что ж, учусь на своих ошибках 🙂
Нарезал в фотошопе, раскидал пикчи по вьюпортам, налил кофе и погнали. Вы знали, что сочетание апельсинового сока с эспрессо это что то магическое? Естественно, начинаю с общих форм, мне нужно поймать габариты и ее флоу. Создаю куб, режу пополам, прикидываю по форме чертежа и получаю такую ерунду:
Накидываю симметрию и сабдивы, чтобы сразу видеть, как отрабатывают смузы. Еще несколько лупов, сверка с чертежами по ширине и очертаниям, получаю уже что то похожее на отливную форму. Тут же нарезаю важные детали, типа окон, дверей…
Держу в голове, что все же хочу делать минималистичную историю, поэтому не рассеиваюсь на всякие доп элементы и пытаюсь сохранить образ классического мини, не спешл эдишн для ралли и тп. Забыл сказать в начале о стилистике, я и для себя не собирал рефов, но подразумевал, что итоговые клаузуры у меня будут что-то типа:
Есть у старых мини такие кайфовые черты кузова, как вот эти заусенцы по бокам. Изначально в топологии я закладывал, что буду их вытягивать. И как бы все ок, получилось вытянуть без проблем, но только сзади))) спереди я просчитался и в лоуполи варианте это смотрелось окей, но при смузах образовывался отвратительный узел, который быстрыми штрихами мне не получалось убрать, поэтому я плюнул, создал доп объект и просто положил на это все дело сверху) Ну и вроде вышло вполне сносно, а концы этого опахала я закрою хромированными элементами.
Также не забываю про днище. Особой детализации мне, как помним, не нужно, но голое пузо хотелось чем то забить, сделал простые цилиндрические формы, чтобы напоминали трубы и какие то двигательные элементы, и захлопнул все пластиковой крышкой, и работу сэкономил, и деталей добавил, хы. Не хочу делать подробностей салона, но нужно, чтобы что то интересное тенями играло внутри окон, поэтому пару-тройку простых экструдов и этого будет достаточно.
Получаем вот такую модельку. Честно сказать, я доволен собой, да она на самом то деле косячная и я много вещей сделал в ней не рационально, куча лишней геометрии, которую по большому счету нужно убирать. Но камон, она у меня первая и вообще не для работы
20 полезных уроков по Cinema 4D
Научиться основам 3D-моделирования можно по бесплатным обучающим роликам. Рассказываем, что смотреть о работе в Cinema 4D.

Разобраться с основами
Если вы никогда не изучали 3D и даже отдаленно не представляете, чем сплайны отличаются от полигонов и что такое модификаторы, стоит начать с самых азов. Практикующий специалист и преподаватель школы компьютерной графики RealTime School Михаил Бычков просто и доступно рассказывает о работе с программой и помогает создать свою первую анимированную 3D-сцену.

Пишет про дизайн в Skillbox. Работает директором по маркетинговым коммуникациям, изучает рекламную графику и 3D.
Первые шаги в моделировании лучше начать с создания примитивов — простых объектов вроде куба, шара, пирамиды и так далее. Какие они бывают, какими настройками различаются и как с ними работать, рассказывается в этом уроке.
Полигональное моделирование — один из самых важных аспектов в 3D. Чтобы освоить работу с полигонами, потребуются часы практики, но понять основы поможет этот урок.
Maxon Cinema 4D для начинающих
Моделирование физической модели движения автомобиля
К этому уроку прилагается 3D-сцена
Собственно говоря, в предыдущих уроках уже были упомянуты отдельные аспекты физики в Cinema 4D: так, например, в самом первом уроке на данном сайте мы с вами роняли шар на плоскую поверхность, позже физическую модель Cinema 4D рассматривали как один из способов моделирования генератора бесконечного движения. Но до сих пор это были лишь частные, крайне поверхностные и самые примитивные аспекты физики.
В данном же уроке мы с вами перейдём к самому интересному: к углублённому изучению физики в Cinema 4D на основе конкретного примера — мы попробуем создать и настроить (хотя бы в самом примитивном варианте) вполне работоспособную физическую модель движения автомобиля по пересечённой местности, имитирующую в общих чертах те же принципы, по которым автомобиль движется в реальном мире.

Необходимость применения физической модели перемещения автомобиля кроется в словах «по пересечённой местности». В большинстве случаев при моделировании автомобильного движения нет никакой необходимости в использовании физической модели: автомобили равномерно движутся по траектории (именно такой транспортный поток мы с вами учились создавать из одной модели автомобиля, помните?), визуально практически никак не взаимодействуя с окружающей обстановкой, и это легко и просто изобразить простыми средствами, не прибегая к физике. Однако как только речь заходит о сложном рельефе местности, по которой едет автомобиль, или о неординарном поведении самого автомобиля (дрифт, заносы или столкновения) — вот тут-то и настаёт черёд физики, если только мы с вами не хотим вручную расставлять огромное количество ключей и править кривые поведения трёхмерной модели для каждой секунды поведения последней (и это без гарантии визуального праводоподобия финального рендера).
Для начала определимся с целями и задачами. В данном уроке наша с вами цель — изобразить более-менее правдоподобное поведение автомобиля при движении по неровной поверхности. Конкретнее: автомобиль должен подпрыгивать и крениться при наезде на неровности, а также вывешивать колёса над выбоинами. А ещё, разумеется, он должен замедляться при преодолении нервностей и ускоряться на ровных участках.
Если бы не ускорение и замедление автомобиля в зависимости от рельефа, то возможно, мы с вами упростили бы себе задачу, «подвесив» автомобиль к движущемуся по заданной траектории невидимому «лидеру» — в этом случае автомобиль уподобился бы детским санкам, скорость которых зависит не от высоты снежных сугробов под полозьями, а от скорости шага отца, который тащит на санках сына. В нашем же случае нам с вами такой вариант решения проблемы не подходит, то есть придётся оборудовать модель автомобиля самым что ни на есть работающим двигателем. Для максимальной эффектности сделаем наш автомобиль заднеприводным внедорожником.
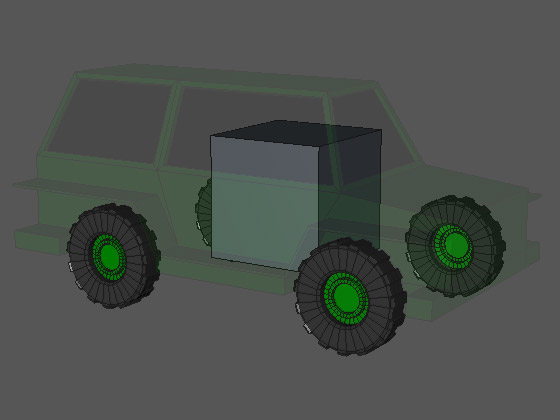
Начнём с моделирования внешнего вида автомобиля (именно внешнего вида, а не физической модели — это не одно и то же!). Состоять наш с вами автомобиль будет всего лишь из пяти трёхмерных элементов: кузов и четыре колеса. Надеюсь, вам понятно, что каждое колесо должно быть отдельным элементом модели. Кроме того, каждое из колёс желательно сделать цельным (монолитным), то есть состоящим из одного-единственного элемента, а не из набора элементов, иначе впоследствии вы столкнётесь с массой сложностей — вам придётся скреплять между собой все элементы каждого из колёс при помощи физических модификаторов, что, на мой взгляд, было бы совершенно излишней тратой времени. Основной принцип, исходя из которого мы с вами разделили элементы модели — это возможность последующего визуального смещения элементов друг относительно друга во время движения внедорожника.

Обратите внимание, что в днище кузова внедорожника предусмотрены вырезы для колёс — оговорюсь сразу, что их отсутствие не помешало бы работе нашей будущей физической модели (позже вы сами в этом убедитесь), но во время просмотра анимации было бы видно проходящие насквозь через днище колёса, что, конечно, было бы грубой визуальной ошибкой.
А теперь переходим к самому главному: к созданию непосредственно физической модели внедорожника. Возможно, вы сразу же предположите, что наступила пора прикрепить колёса к кузову. Ни в коем случае! Ни сейчас, ни позже. И вот почему. Дело в том, что прикрепи вы колёса непосредственно к кузову — у вас опять-таки возникла бы куча сложностей: физическая модель Cinema 4D воспринимала бы колёса как находящиеся внутри кузова (т. е. как бы завязшие внутри него), и во что бы то ни стало пыталась бы высвободить их, вследствие чего вместо более-менее правдоподобного поведения колёс вы увидели бы главным образом их мелкую, безостановочную вибрацию и минимум реакции на физическое взаимодействие с прочими окружающими внедорожник объектами. Конечно, проблема эта вполне решается тонкой и длительной настройкой значений динамики сцены и моделей, вроде интервалов, по достижении которых начинается взаимодействие трёхмерных элементов, но мы с вами пойдём более простым путём.
Мы с вами пойдём более простым путём — и создадим на сей раз не визуальную, а физическую модель кузова автомобиля. В исполнении автора — это самый обычный полигональный куб. В вашем это может быть любой другой полигональный объект — главное, чтобы он не был виден под кузовом внедорожника, и чтобы он был полигональной моделью, края которой находятся достаточно далеко от колёс. Этот элемент мы условно назовём весовым центром.
Почему именно так, спросите вы? Почему это не может быть NULL-объект или сплайн?
Потому что созданный нами весовой центр по определению и в силу своего наименования предназначен для активного участия в физической модели внедорожника. Ни сплайны, ни NULL-объекты, будучи наделены физическими характеристиками, не используют последние, так как не имеют физической поверхности.
Итак, весовой центр внедорожника создан. Переходим к прикреплению колёс. При отсутствии физической модели мы просто подчинили бы их кубу (или даже кузову) в менеджере объектов, и этого было бы вполне достаточно. В нашем же случае колёса должны быть прикреплены не жёстко, а с учётом определённой физической свободы, то есть возможности слегка смещаться относительно весового центра при возникновении физического взаимодействия с другими объектами в сцене (например, с неровностями дорожного покрытия).
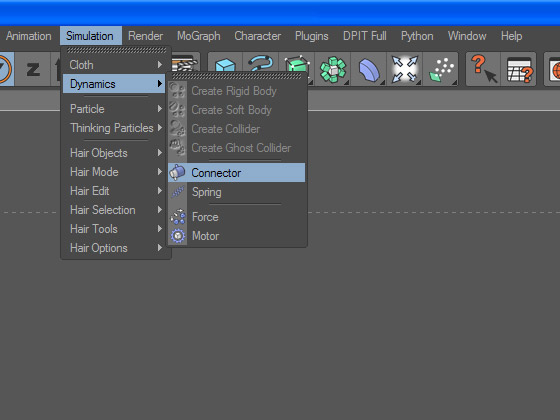
Именно для такого вида крепления в Cinema 4D предусмотрены объекты типа «Connector» (от англ. «connect» — «соединять»). Переходим в верхнее меню, ищем пункт «Simulation», в выпадающем из этого пункта меню выбираем подпункт «Dynamics» и в выпадающем подменю жмём «Connector».
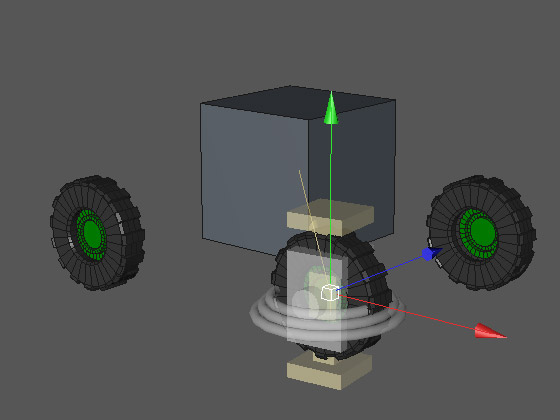
Мы видим, что в рабочем окне появился новый объект, а в менеджере объектов — его наименование. Начнём с правого переднего колеса. Размещаем коннектор в точке, где расположен геометрический центр колеса, которое будет прикреплено с помощью коннектора к кузову — при этом сам геометрический центр колеса должен быть расположен в том месте, где у колеса как бы находится центр колёсной ступицы.
Теперь нужно настроить коннектор. Выделяем его наименование в менеджере объектов и видим открывшееся ниже окно свойств.
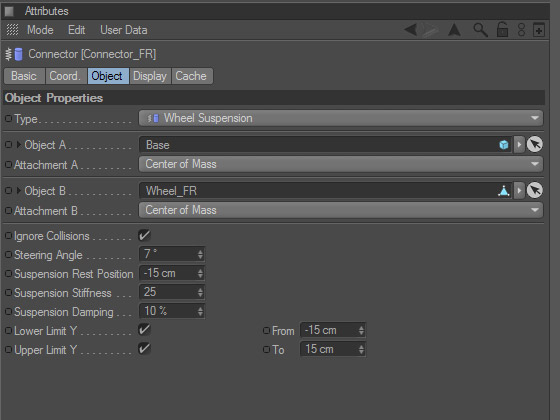
Первый параметр, значение которого нам следует изменить — это тип соединения (параметр «Type»), от него зависит, по каким закономерностям будет смещаться колесо относительно кузова. Очевидно, наиболее подходящим типом соединения в нашем случае будет «Wheel Suspension». В поле напротив слов «Object A» перетаскиваем из менеджера объектов наименование весового центра, на изображении ниже он обозначен как «Base» — это объект, к которому мы с вами прикрепляем колесо. В поле напротив слов «Object B» перетаскиваем наименование колеса (на изображении обозначено как «Wheel_FR», от сокращения «Wheel Front Right») — это объект, который мы с вами прикрепляем. Параметры «Attachment A» и «Attachment B» трогать не будем — они обозначают, где у объектов находятся центры масс, и выставленные по умолчанию значения в данном случае нас вполне устраивают.
Переходим к тонкой настройке коннектора.
Закончив настройку коннектора, повторяем ту же операцию — начиная с создания нового коннектора — для второго переднего колеса, на сей раз левого. Вместо путешествий по верхнему меню, как вы, вероятно, уже сообразили, можно просто найти созданный нами ранее коннектор правого переднего колеса, и изо всех сил вдавив и не отпуская клавишу «Ctrl» на клавиатуре, перетащить наименование коннектора на свободное место в менеджере объектов — после выполнения этой операции мы с вами получим новую копию коннектора, да к тому же унаследовавшую от своего оригинала все настройки. Главное — не забудьте сменить в поле «Object B» свойств нового коннектора наименование правого колеса на наименование левого.
С передними колёсам закончили. Переходим к задним.
И сразу же сталкиваемся с несколько неочевидным на первый взгляд вопросом: сколько двигателей должно быть у нашего внедорожника? Что за странный вопрос, скажете вы — один, естественно.
Объясню, с чем связан такой вопрос. В реальном механизме автомобиля крутящий момент передаётся на оба ведущих колеса одновременно через достаточно сложную систему механических приводов. Нам с вами нет смысла моделировать эту систему приводов, так как у нас нет задачи визуализировать внутреннее устройство внедорожника, а значит, вместо полноценной работы двигателя мы можем позволить себе любую его упрощённую физическую имитацию, лишь бы ведущие колёса крутились и толкали автомашину вперёд.
Таким образом, у нас с вами имеется два альтернативных решения: если нам позарез требутся изобразить раздельную тягу двух ведущих колёс, мы можем добавить в виртуальную конструкцию два отдельных двигателя, каждый из которых будет крутить «своё» колесо. Если же моделирование раздельной тяги нам с вами не нужно, то наиболее эффективным и простым способом привести автомобиль в движение будет создание так называемой «колёсной пары» — два наглухо сцементированных вместе колеса, которые приводятся в движение одним мотором.
В данном уроке мы с вами выберем второй, более простой способ — создание колёсной пары и её вращение одним мотором. С оговоркой, что в принципе при желании можно усложнить и этот способ — к примеру, вращать не колёсную пару, а ось с прикреплёнными к ней при помощи коннекторов ведущими колёсами, чтобы последние свободно вихлялись туда-сюда, как это уже настроено нами ранее для передних колёс. Впрочем, в данном уроке лишне усложнять себе задачу мы с вами не будем, есть желание — экспериментируйте самостоятельно на основе сцены, приложенной к этому уроку, ссылку на неё можно найти в начале урока.
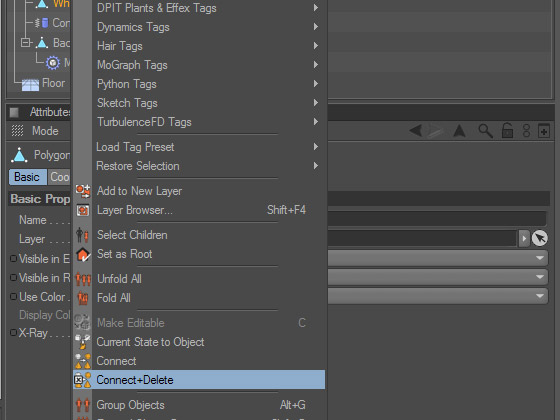
Итак, решено — создаём колёсную пару: выделяем два задних колеса — можно в рабочем окне, можно в менеджер объектов, где вам удобнее — затем уже именно в менеджере объектов щёлкаем на любом из них правой клавишей мыши и в выпадающем контекстном меню ищем пункт «Connect+Delete» («Соединить и удалить»). Строкой выше в том же контекстном меню есть пункт «Connect» — он при объединении элементов создаёт новый объект, оставляя нетронутыми оригиналы объединяемых моделей, нам же с вами оригиналы раздельных задних колёс не понадобятся.
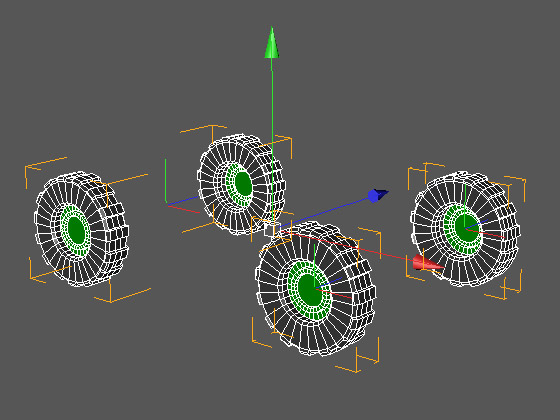
Мы видим, что задние колёса внедорожника стали одним трёхмерным элементом — то, что нам и требовалось.
Создаём ещё один коннектор — на сей раз для задней колёсной пары, и учитывая её монолитность, всего один, после чего настраиваем его. Располагаем его, естественно, в центре колёсной пары.
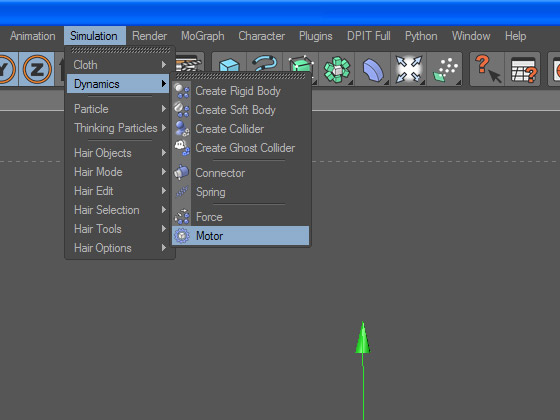
Теперь создаём мотор: верхнее меню, снова пункт «Simulation», выпадающее меню, подпункт «Dynamics», в выпадающем меню подпункт «Motor».
Располагаем созданный мотор там же, где коннектор для колёсной пары — посерединке между задними колёсами (или, выражаясь научно, в геометрическом центре задней колёсной пары), затем выделяем его наименование в менеджере объектов, плавно премещаем взгляд в открывшееся ниже окно свойств мотора и приступаем к настройке.
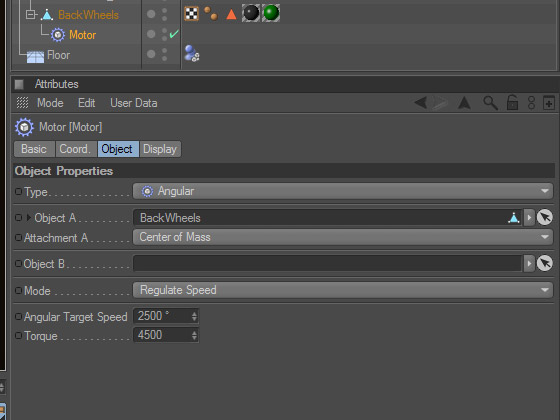
В поле рядом со словами «Object A» перетаскиваем из менеджера объектов наименование задней колёсной пары (на изображении оно обозначено как «Back Wheels»). В поле рядом со словами «Object B» ничего не перетаскиваем. Для параметра «Type» («Тип») выбираем значение «Angular» («угловой») — всё правильно, ведь для движения внедорожника созданный нами мотор должен непрерывно поворачивать ведущую колёсную пару на определённый угол. В качестве значения для параметра «Mode» («Режим») указываем «Regulate Speed» («Постоянная скорость»). Ну и наконец указываем числовые значения для параметров «Angular Target Speed» («скорость вращения цели») и «Torque» («крутящий момент»).
Вероятно, вы уже готовы запустить анимацию и проверить полученный результат. Если так, то — несколько рановато: ведь мы с вами выполнили только одну часть работы — настроили физическое воздействие на объекты, тогда как самих физических объектов у нас с вами пока нет. А колёса, скажете вы, а кузов, а весовой куб? Верно, полигональные модели созданы, но физически для сил воздействия ни колёс, ни кузова, ни весового куба пока не существует — пока колёсам, кузову и весовому кубу не назначен тег динамики. Ибо именно назначенный полигональному элементу трёхмерной сцены тег динамики обозначает, что данный элемент участвует во взаимодействии с другими элементами, обладающими динамическими характеристиками.
Приступаем к настройке физических характеристик внедорожника. А заодно и выстраиваем иерархическую структуру элементов, из которых он состоит. Первым делом создаём группу, в которой будут собраны все элементы автомобиля (если этого ещё не сделано) — это можно сделать, объединив несколько первых попавшихся под руку элементов при помощи комбинации клавиш Alt+G (напоминаю, что в отличие от общепринятого в Cinema 4D способа последовательного раздельного нажатия клавиш, эта комбинация нажимается одновременно!), либо создав NULL-объект.
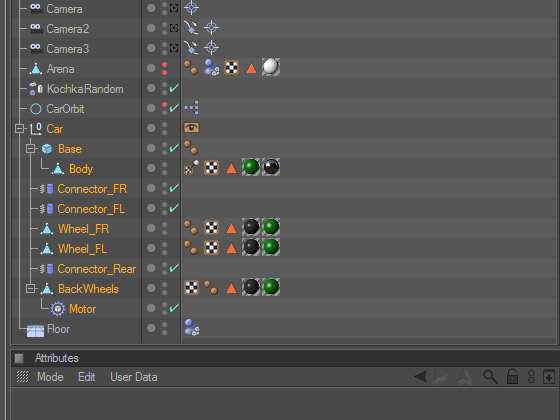
Далее обзываем созданную группу неким уникальным, неповторимым и незабываемым словом (к примеру, автор назвал её «CAR») и запихиваем в неё все относящиеся к внедорожнику элементы: кузов, колёса, коннекторы, весовой куб и мотор.
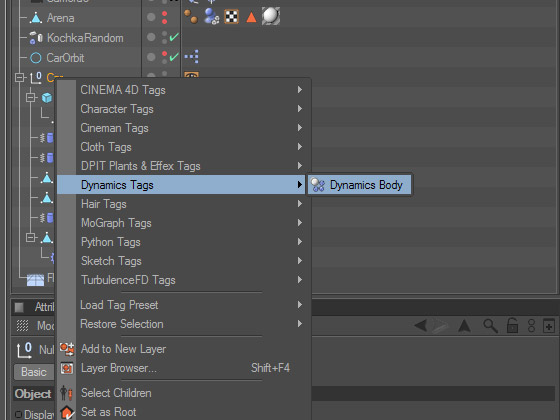
Теперь обозначаем элементы группы как участников физического взаимодействия с окружающей физической моделью: выделяем наименование группы, щёлкаем на нём правой клавишей мыши, в выпадающем меню наводим курсор мыши на пункт «Dynamics Tags» («Теги динамики») и в выпадающем из последнего подменю выбираем единственный пункт — «Dynamics Body».
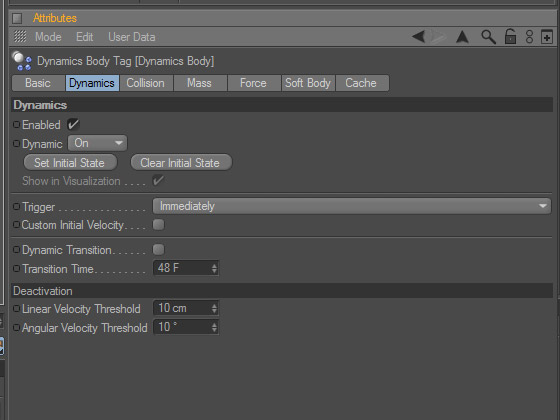
Если до сих пор вы внимательно знакомились с данным уроком, то, возможно, спросите: как группа «CAR», будучи NULL-объектом, может физически взимодействовать в физической модели? Верно, сам NULL-объект — никак. Зато свойства динамики могут унаследовать от него все подчинённые ему элементы, при этом отпадает необходимость назначать тег динамики каждому элементу индивидуально. Главное — правильно настроить тег динамики группы. Настраиваем: выделяем тег и в открывшемся ниже окне свойств выбираем вкладку «Dynamics», в которой активируем параметр «Enabled» (тем самым включая физику взаимодействия) и выбираем значение «On» для параметра «Dynamic» (тем самым указывая участие группы во всех общих для сцены физических правилах, типа гравитации и пр.).
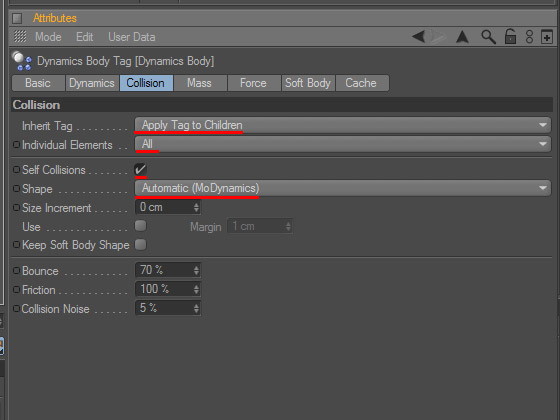
. после чего переходим во вкладку «Collision» («Соприкосновение») в том же окне свойств и указываем значения, заставляющие элементы группы наследовать правила динамики: «Apply Tag to Children» («распространять действие тега на дочерние элементы») для параметра «Inherit Tag» («Наследование»), «All» («всё») для «Individual Elements» («Отдельные элементы»), галочку напротив «Self Collisions» («Собственное взаимодействие») и «Automatic (MoDynamics)» для «Shape» («Контур»). Остальные параметры настраиваем на свой вкус.
Тут будет уместно наконец-то вспомнить про кузов внедорожника. По нашей задумке, он также должен взаимодействовать с окружающей физической моделью трёхмерной сцены — например, разбрасывать носовой частью стену из картонных ящиков, — но при этом не должен взаимодействовать с другими элементами своей же группы — с весовым кубом и колёсами. Чтобы добиться такого результата, мы с вами подчиним его весовому кубу и назначим кузову индивидуальный тег динамики — точно так же, как группе элементов автомобиля, — но в теге динамики кузова отключим параметр «Dynamic» (укажем для него значение «Off») во вкладке «Dynamics» (обратите внимание, параметр «Enabled» остаётся активированным, иначе кузов вообще перестанет участвовать в физической модели сцены, и любое оказавшееся на пути внедорожника препятствие свободно пройдёт насквозь через кузов!). Во вкладке «Collision» назначенного кузову тега динамики для параметров «Inherit Tag» и «Individual Elements» можно указать соответственно «None» и «Off» — у кузова нет подчинённых элементов, которым следовало бы передавать динамические свойства кузова.
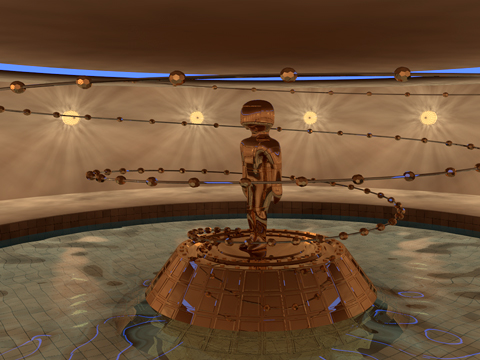
Всё, что осталось — это добавить в трёхмерную сцену неоднократно упоминавшуюся выше окружающую физическую модель — некий неровный рельеф, который в финальной анимации выявлял бы физически правдоподобную реакцию автомобиля на взаимодействие с ухабами. В приложенной к уроку сцене — это грубое подобие некоей арены с усеянной буграми сердцевиной.
В данном уроке мы с вами изучили создание простейшей физической модели движения автомобиля — без каких-либо дополнительных плагинов и модулей, штатными средствами Cinema 4D. В уроке, как вы заметили, не рассматривается моделирование поворотов, созданная нами модель способна к движению только по прямой — разумеется, если только неровности рельефа под колёсами не изменят траекторию движения (что и происходит в нижеприведённом видеоролике). К слову говоря, автор намеренно настроил параметры физической модели трёхмерной сцены так, чтобы движение внедорожника было как бы гиперболизировано, с целью наглядно продемонстрировать взаимодействие колёс и кузова машины с неровностями. Кроме того, в приложенную к уроку сцену входят и другие, не упомянутые в уроке элементы, предназначенные для съёмки и освещения. Впоследствии, возможно, на сайте будут рассмотрены и более сложные физические модели.
Финальный результат в виде анимации.
Maxon Cinema 4D для начинающих
Осваиваем работу с камерой в Cinema 4D
К этому уроку прилагается 3D-сцена
В данном уроке мы рассмотрим основные принципы работы со съёмочной камерой в Cinema 4D.
Основной вопрос, который возникает у новичков (несмотря на всю кажущуюся очевидность ответа) — зачем вообще нужен такой объект, как камера? Ведь отрендерить трёхмерную сцену можно без какой-либо камеры, из рекдакторского ракурса.
Ответ, как и было сказано выше, очевиден: наличие камеры в сцене неимоверно расширяет управляемость ракурсами и методами съёмки при рендере, и рендерить сцену без использования камеры — примерно то же самое, что рендерить сцену с дефолтным освещением.
Основные возможности камер в Cinema 4D навскидку — это изменяемое фокусное расстояние и глубина резкости, программируемое поведение камеры и смена камер с одной на другую, а также многое другое.
Ниже мы рассмотрим эти возможности поподробнее. За основу мы возьмём некий абстрактный интерьер с загадочной фигурой, стоящей на окружённом водой постаменте в центре.
Прежде всего, разумеется, создадим съёмочную камеру, с которой в дальнейшем нам предстоит экспериментировать. Создание камер доступно из верхней панели инструментов, что под главным верхним меню. Выбираем пиктограмму с условным обозначением источника света и в выпадающем меню нажимаем на пункт «Camera». Обратите внимание: справа напротив этого пункта расположен пункт «Target Camera» («Нацеленная камера») — так вот, этот пункт создаёт такую же в точности камеру, что и выбранный нами пункт «Camera» выпадающего меню, но только с уже присвоенным камере тегом «Target» («Цель»). Другими словами, выбрав в выпадающем меню пункт «Camera» и затем самостоятельно назначив созданной нами камере тег «Target», мы создадим точно такую же камеру, какую создаёт пункт «Target Camera».
Раз уж выше столько сказано про тег «Target», то следующим шагом присвоим его созданной нами камере и разберём, что он делает. Ищем в менеджере объектов справа наименование камеры, щёлкаем на нём правой клавишей мыши, в выпадающем контекстном меню выбираем самый первый (верхний) пункт «CINEMA 4D Tags», по наведении на него курсора выпадает ещё одно подменю, в котором мы ищем «Target» — это и есть нужный нам тег.
Что делает этот тег? Его назначение ясно из названия: тег позволяет легко и быстро нацелить объектив виртуальной съёмочной камеры на любой объект (в Cinema 4D можно нацелить камеру даже на саму себя, правда, смысла от такого действия будет, мягко говоря, маловато). Эта возможность особенно удобна, если требуется отслеживать в кадре конкретный движущийся объект, однако у тега имеются и иные применения.
Тег нацеливания мы создали, теперь необходимо указать тегу конкретную цель. Для этого сначала выделяем в менеджере объектов тег нацеливания камеры (при этом ниже появляется окно свойств тега), затем ищем в менеджере объектов наименование цетральной фигуры, щёлкаем на нём левой клавишей мыши, и не отпуская клавишу, перетаскиваем наименование центральной фигуры в поле «Target Object» («На какой объект нацелиться») свойств тега «Target». Если мы всё сделали правильно, наименование центральной фигуры остаётся на прежнем месте в менеджере объектов, а также появляется в поле в поле «Target Object» свойств тега «Target», куда мы его перетащили. Наименование центральной фигуры и съёмочной камеры в менеджере объектов на картинке ниже выделены просто для наглядности, выделять их для нацеливания не нужно.
Итак, мы создали камеру и нацелили её на центральную фигуру, но не наблюдаем в рабочем окне никаких изменений.
Причина простая: в данный момент мы видим сцену через объектив редакторской дефолтной камеры. А нам необходимо, если можно так выразиться, сесть в кресло оператора созданной нами камеры. Лезем в верхнее меню рабочего окна (не путайте это меню с главным верхним!), переходим к пункту «Cameras», в выпадающем меню жмём на самый первый (верхний) пункт «Scene Cameras» и в выпадающем из последнего подменю выбираем наименование созданной нами камеры (сейчас в сцене имеется всего одна камера, как видно на изображении ниже).
Мы с вами видим, что ракурс тут же меняется: теперь мы смотрим строго на центральную фигуру.
Один из самых популярных вопросов, возникающих у новичков: как закрепить камеру наглухо, чтобы её невозможно было случайно сдвинуть с места или изменить ракурс?
Дело в том, что при работе с трёхмерной сценой многие время от времени забывают сменить съёмочную камеру на редакторскую, а позже, покрутив камеру туда-сюда, вдруг обнаруживают, что утерян тщательно подобранный ранее ракурс.
Специально для подобных случаев в Cinema 4D существует тег «Protection»: ищем в менеджере объектов наименование камеры, щёлкаем на нём правой клавишей мыши, в выпадающем меню выбираем пункт «CINEMA 4D Tags», в выпадающем из него подменю нажимаем «Protection» — готово, камера закреплена.
Рассмотрим другие возможности съёмочной камеры в Cinema 4D.
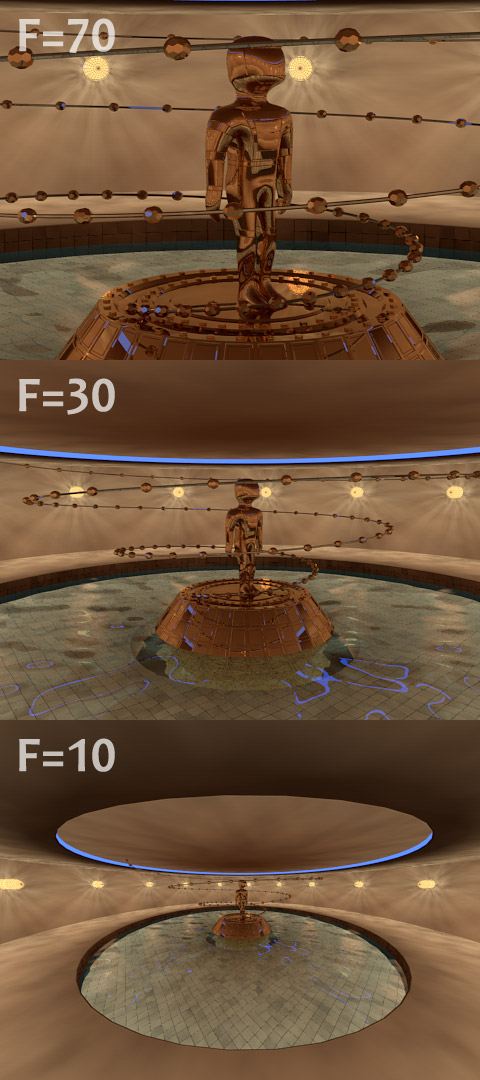
Практически самый главный параметр камеры — фокусное расстояние: от его значения зависит степень охвата камерой трёхмерной сцены. Чем больше фокусное расстояние, тем меньше охват сцены, ближе объекты в кадре и меньше перспективные искажения, и наоборот. Ниже приведены для сравнения три вида сцены с различными фокусными расстояниями, указанными для одной и той же неподвижной камеры. Обратите внимание, как искажена перспектива на последнем из рендеров.
Крайне популярный приём в кинематографии — показывать объект съёмки крупным планом на фоне размытого, нечёткого фона, чтобы акцентировать внимание зрителей на центральном объекте (а в 3D-сценах ещё и добавить реалистичность рендеру). Для создания такого эффекта в списке свойств камеры предусмотрена вкладка «Depth» («Глубина резкости»).
Поскольку камера у нас уже имеет тег «Target» и нацелена на центральную фигуру, воспользуемся этим и отметим галочкой пункт «Use Target Object» («Использовать целевой объект») — в этом случае центр резкости камеры будет автоматически настроен на целевой объект, то есть на центральную фигуру. Отмечаем галочкой пункт «Front Blur» («Размывка переднего плана»), если хотим, чтобы камера размывала объекты, расположенные перед целевым объектом, и пункт «Rear Blur» («Размывка заднего плана»), если хотим видеть размытыми фон и объекты, находящиеся за целевым объектом.
И конечно, не забываем о том, что эффект глубины резкости при рендере обеспечивается соответствующим дополнительным встроенным фильтром. Добавляем фильтр и во вкладке «Basic» указываем интенсивность эффекта. Для наглядности в изображении ниже совмещены выбор фильтра и окно его свойств — на самом же деле уже установленный фильтр в списке не показывается.
На изображении ниже использованы фокусное расстояние камеры 135 и степень глубины резкости 16%, с размытием переднего и заднего планов.



