Пару слов о Multiplex, или как это связано с режимами «POWER/SNOW» в Toyota Aristo 160-161.

Пару слов о Multiplex, или как это связано с режимами «POWER/SNOW» в Toyota Aristo 160-161.
Поскольку все эти салонные системы связаны воедино, а блок — часть шины Multiplex, с машиной можно выделывать кое-какие трюки.
Именно поэтому, если, например, удерживать кнопку закрытия дверей — все открытые стекла и люки будут закрываться, пока нажата кнопка.
И то, что если шаманить с кнопками и проделывать разные трюки из серии: нажать три раза тормоз, включить аварийку, открыть стекло, закрыть открыть двери, выключить и включить снова зажигание, можно, например, запрограммировать новый чип-ключ для иммобилайзера (комбинация, которую я описал — «от балды) или включить, выключить блокировку дверей при наборе скорости и так далее.
В том числе и органы управления режимами «Power и «Snow» трансмиссии проходят через блок. Хотя, например, режимы ручного переключения передач «UP» «Down» и «CCS» (круиз контроль) управляются отдельными проводами, идущими непосредственно в блок управления двигателем. Почему-то в тойоте посчитали, что эти режимы важнее, и они должны иметь надежную связь с двигателем. Так же как и сигнал «Check Engine», который идет на приборку старым способом через пин «W».
Ну, то зачем «Check Engine» идет отдельно — понятно. В случае серьезной неисправности, водитель в любом случае будет всегда проинформирован, что с двигателем проблема, даже при отказе всех других систем, достаточно только, чтоб к лапочке «Check Engine» приходило питание.
Сегодня вечером начну подсоединять и тестить как работает. В теории должно заработать, но надо убедится в этом, так как могут вылезти какие-нибудь подводные камни.
Кстати, до кучи еще ликвидировал старую штатную шумоизоляцию, которая за 24 года на 80% покрытия кузова просто превратилась стекло и пыль. И напрочь потеряла все свои шумо-виброизоляционные свойства.
Мультиплекс что это в автомобиле
В мультиплексной системе все потребители электроэнергии с одной стороны подсоединены к линии электропитания, которая начинается от аккумуляторной батареи, а с другой — к информационной линии, соединяющей их с управляющим устройством. Находящиеся в непосредственной близости от потребителя программируемые электронные компоненты отфильтровывают предназначенные для них данные из информационной линии и подключают (или отключают) его к (от) источнику питания. То есть в данном случае для реализации каждой отдельной функции органа управления (стеклоподъемник, система замков дверей с центральным управлением, противоугонное сигнальное устройство и т. п.) в исполнительном элементе собственная линия не нужна.
Для того чтобы исполнительные блоки, т. е. потребители и блок управления, могли обмениваться информацией между собой, необходимо выполнить несколько условий. В частности, нужно, чтобы: канал передачи информации обеспечивал высокую скорость передачи данных; информация передавалась посредством физических величии (напряжение, сила тока, освещенность и т. д.); передача данных была регулируемой (кодирование, скорость передачи, аналогово-цифровое преобразование, разбивка и т. д.), т. е. выполнялась по так называемому протоколу.
Комплексный подход к мультиплексированию привел разработчиков к использованию шины с распределенной обработкой сигналов и схемой обнаружения конфликтных ситуаций, позволяя добавлять новые и новые модули, не перегружая систему в целом. (Это «сродни» архитектуре персонального компьютера, где по мере изменения характера решаемых задач можно установить дополнительные платы, не разрушая основу компьютера.)
Понятно, что инициаторами нового направления стали производители дорогих автомобилей — фирмы «Мерседес- Бенц», «Вольво» и др. Например, в 1990 г. на рынке появился «Мерседес-Бенц 500Е», контроллер двигателя которого общался с датчиками через цифровую шину. Всего год спустя, довольные результатом, конструкторы развили идею в автомобилях 8-класса с кузовом W140, где единственная цифровая шина связала между собой системы зажигания, впрыскивания топлива, АБС, ПБС, самодиагностирования, круиз-контроля, климат-контроля, кондиционер, клапаны управления циркуляцией воздуха, а также СD-плейер, сотовый телефон и систему «Лингватроник» распознавания голосовых команд. Здесь, кроме того, впервые была применена технология D2B, использующая не электрические, а световые сигналы. Причем последнее обусловлено несколькими причинами.
Во-первых, множество работающих электродвигателей, реле и прочих исполнительных механизмов излучают огромное количество разнообразных волновых помех. Поэтому нельзя исключить того, что одна из них совпадет с какими-либо бортовым управляющим сигналом. И тогда неожиданно для водителя может сработать, к примеру, один из контуров тормозной системы или подушка безопасности. В оптическом же диапазоне побочных излучений нет, и это обеспечивает надежность цифровой системы.
Во-вторых, передача сложных высокочастотных сигналов аудиосистем требует высокого (свыше 6 Мбит/с) быстродействия, что тоже вполне «доступно» оптическому диапазону.
В-третьих, при отсутствии изломов оптоволокна нет проблемы коротких замыканий, пожароопасное и окисления контактов.
Вторая по быстродействию (500 кбит/с) сеть из применяемых на дорогих автомобилях, CAN-Bus-C, связывает между собой системы управления двигателем, тормозами, автоматического поддержания дистанции между автомобилями («Дистроник»), подвеской, фарами и т. д. В общем, все то, что необходимо непосредственно для движения.
Наконец, самая медленная (83,3 кбит/с) по действию сеть — CAN-Bus-В. Она объединяет приборы, обеспечивающие комфорт в салоне в том числе: климат-контроль; индикатор парковки («Парктроник»); управление люком в крыше, стеклоподъемниками, замками, а также комбинацию приборов.
Две последние сети соединены между собой через электронный замок зажигания и могут обмениваться информаци- ей. Более того, аудиовидеосистема подсоединена не только к оптоволоконному кабелю, но и к CAN-Bus-В, а значит, в необходимых случаях возможна передача сигналов всеми тремя сетями.
К началу 1990-х годов стали опасаться, что на пути массового внедрения мультиплексирования возникнет барьер — высокая стоимость системы, естественным образом сказывающаяся на цене самого автомобиля. В связи с этим эксперты прогнозировали появление первого серийного автомобиля с мультиплексной системой не ранее 1995—1997 гг.
По срокам они ошиблись не намного. Частично мультиплексированный серийный автомобиль БМВ-850i был представлен в 1994 г. Модель была оснащена мультиплексной техникой, объединяющей различные функции управления в дверном модуле. Что касается стоимости, то здесь ошибка даже больше. Если, например, необходимо автоматически включить освещение, как только детектор дождя отметил наличие осадков, то достаточно изменить внутреннее программное обеспечение блока, управляющего освещением, — так, чтобы он распознавал сигнал «дождь», уже появившийся, на мультиплексной шине. И это никак не сказывается на стоимости автомобиля. Более того, мультиплексирование может даже удешевить отдельные системы автомобиля. Вот характерный пример: на одном легковом автомобиле представительского класса, оборудованном традиционной системой электрооборудования, в стойке двери был проложен жгут из 50 проводов. Когда же сети объединили, их число сократилось до четырех. И если учесть, что различные расширения функциональных возможностей электрооборудования, которые обычная техника не позволяет реализовывать из-за недостатка места на автомобиле, с помощью мультиплексной техники становятся вполне возможными, то ясно: это — повышение показателя «качество—цена». Со всеми вытекающими отсюда последствиями на рыночный опрос. И хотя для автомобиля БМВ-850i это была всего лишь встроенная в дверь система управления стеклоподъемником и защиты от защемления (например, руки ребенка стеклом), и данные функции объединил дверной модуль, кодированные сигналы которого передавались по двум линиям в основной модуль центрального блока управления, затраты на мультиплексную технику позволили сэкономить в общей сложности 39 линий, из них 14 — в двери водителя, 21 — в двери со стороны пассажира, сидящего рядом с водителем.
Фирма «Вольво» представила свою модель автомобиля (S80) несколько позже — в 1998 г. Но уже с полностью мультиплексированной системой, в состав которой входят 24 модуля, управляющие силовыми цепями. Система работает, в зависимости от возложенных на нее функций, в двухскоростном режиме: для управления двигателем и трансмиссией используется шина данных, рассчитанная на передачу информации со скоростью 250 кбит/с, а для других устройств — более «медленная» (125 кбит/с).
В 1999 г. к БМВ и «Вольво» присоединилась и фирма «Пежо»: на двух своих моделях, «Пежо-206» и «Пежо-406», она установила мультиплексную проводку, в которой использованы два дополняющих друг друга сетевых протокола. Так, комплексный контроль работы двигателя, коробки передач и АБС выполняет разработанная фирмой «Бош» шина САN, а шина VAN, разработанная фирмами ПСА и «Рено», — электроникой кузова (кондиционером, системой дверных замков и т. д.) и регулированием устойчивости автомобиля при движении. Причем новые функции осуществлялись уже не за счет встраивания дополнительных электрических приборов, а благодаря требующему меньших затрат программному обеспечению.
Имеющиеся в настоящее время разработки реализованы, в основном, зарубежными производителями. Однако существующие сегодня потребности автомобильного рынка и высокие цены на зарубежную электронику обусловили некоторое развитие и российского производства мультиплексных систем.
блок комфорта MULTIPLEX и все о том, что не работает в салоне…

Опишу свой опыт, может кому и пригодиться, информация по данной теме вроде есть, но ничего обобщенного не нашел, попытаюсь это сделать.
1) Блок комфорта MULTIPLEX она же синяя коробочка в ногах у водителя, с внутренней стороны панели предохранителей.
2) За что отвечает: за все внутри салона, а именно подсветка салона вся, концевики дверей, дистанционный ключ, (задние габариты, подсветка номера, только на предмет неисправности ламп, точнее за чек на табло), подъемники стекол, центральный замок, подсветка замка зажигания и ног, прикуриватель и прочее (по схемам в мануале).
3) Особенность! По всем схемам при подключении всяких ништяков типо: сигнализации, доводчики стекол, обратная связь, ДИОДЫ в подсветку салона (любую, кроме кнопок панели)- НЕ ИМЕЕТ предохранителей на своем пути! Отсюда имеем:
При неграмотном подключении сигнализации, а еще хуже и чаще ее неграмотном (пофигистичном при последующей продажи авто) демонтаже имеем одну или несколько сразу проблем: не работающий родной центральный замок, открытие и закрытие дверей центральным замком в непонятной последовательности, не горит подсветка замка зажигания, индикатор открытых дверей, не работают стеклоподъемник какой-то один или несколько, не горит свет в потолке при открытии двери или горит но только принудительно в положении ON, не складываются зеркала или одно зеркало (как правило правое), не горит свет в передних дверях или двери при открытии, не правильно работает прикуриватель и прочее…
3) Что происходит и из-за чего: В основном выгорают дорожки на плате или резисторы (видно часто не вооруженным глазом), ни разу не видел чтоб сгорал сам чип процессор (Он кстати у нас от Motorolla), но по теории и такое возможно, но в этом случае придется искать новый блок…
Основная причина, на мой взгляд и личный опыт, в коротком замыкании + на — по всей внутренней косе (имеется в виду от, к примеру, лампы подсветки ног, до блока мультиплекс), происходит от того, что часто при работе с электрикой внутри салона, включая замену ламп на диоды мы забываем скинуть клемму с АКБ, и не соблюдаем полярность при установки новых ништяков, все тех же диодов или новой приблуде GPS или сигнализации или устанавливаем не верно и вопреки законов физики и схем мануала или от усталости проводки и сырости в каналах косы (это самое печальное но имеет место быть), ЕЩЕ ВАЖНО чтобы все предохранители в блоке предов стояли по своему НОМИНАЛУ, это обсурд, но такое тоже бывает, что за место 10А стоит 25А))
Смысл записи: если что то из выше перечисленного не работает или работает но через раз — смотрите этот блок на предмет целостности дорожек и резисторов. Работы на 5 мин. резистор стоит от 2 до 20 рублей в любом радиотехническом магазине, дешево и сердито и все работает. НОВЫЙ БЛОК ЭКЗИСТ на сегодня выдает 20 000 рублей. РАЗБОРКА от 2 000 рублей (Центральная Россия). Блоки на разных комплектациях стоят разные!
Как достать (У меня была целая эпопея): лезем в ноги водителя справа, снимаем ковер, снимаем пластиковую панель с окошком для доступа к предам ( два пистона вроде и болт в корпусе в стороне двигателя, хитрых, нужно узкими щипцами), видим панель с предами, отсоединяем все разъемы к панели, панель спредами откручиваем болт в полу у мотора и ближе к двери вверху пистон хитрый — тоже с двух сторон щипцами. Отгибаем панель ( не снимая ее и ничего не отламывая) к педали газа — видим блок синяя коробка, отщелкиваем его от панели предов, вытаскиваем штекер внизу (защелка с внешней стороны), вытаскиваем блок, смотрим, что там сгорело, либо дорожки, чаще всего видим вздутые «боченки» резисторы, забавное зрелище, меняем их и все в обратном порядке и все заработает! Конечно все это делаем на обесточенном авто =)))
Естественно это нужно делать в самую последнюю очередь, сначала проверяем лампы на работоспособность, прозваниваем преды и так далее, а потом лезем туда.
Надеюсь, кому то это поможет, потому, когда я искал конкретику, я ее не нашел, тут вроде все описал, что я для себя вынес из этой проблемы. Может я где то и не прав, если будут исправления или дополнения — буду рад услышать)
Фото к сожалению нет, все делалось быстро и в плохую погоду.
Автомобильные мультиплексные системы передачи информации
За последние 20 лет значительно возросла сложность автомобильной электропроводки. Сегодня разработка и изготовление автомобильного жгута проводов является проблемой из-за его размеров и массы. В современном автомобиле может быть более 1200 отдельных проводов. Большое число проводов и соединений ухудшает надежность. По стоимости автомобильный жгут проводов занимает четвертое место после кузова, двигателя и трансмиссии.
Растет число систем автомобиля, имеющих автотронное управление, таких как:
— управление коробкой передач;
— активная подвеска и т.д.
Эти системы в той или иной степени связаны друг с другом. Выходные сигналы некоторых датчиков могут использоваться не сколькими электронными системами. Можно применять один компьютер для управления всеми автомобильными системами (но на текущий момент и в ближайшем будущем это экономически нецелесообразно). Начинает претворяться в жизнь другое техническое решение, когда контроллеры отдельных ЭБУ связываются друг к другом коммуникационной шиной для обмена данными. Датчики и исполнительные механизмы, подключенные к данной шине через специальные согласующие устройства, становятся доступными для всех ЭБУ. Это решение представляет собой локальную вычислительную сеть (ЛВС) на борту автомобиля.
Мультиплексные системы значительно отличаются от обычных:
1) в обычных системах электропроводки информация и питание передаются по одним и тем же проводам. В мультиплексных системах сигналы и электропитание разделены;
2) в мультиплексных системах управляющие ключи непосредственно не включают и не выключают электропитание нагрузок;
SAE разделяет автомобильные сети на три класса: А, В и С, отличающиеся скоростью передачи данных и областями применения (таблица 2.4). Причем к сетям класса С предъявляются особо жесткие требования, поскольку они по одному каналу связи обслуживают наиболее ответственные системы автомобиля, а передаваемые по ним сообщения могут быть как периодическими, так и случайны ми. Такие сети должны быть не только надежными и защищенными от внешних воздействий, но и обеспечивать возможность расстановки приоритетов различным сообщениям, сигнализировать об ошибках в передаче управляющих сигналов, иметь скорость реакции на важное сообщение определенной длительности.
Таблица 2.4 Классификация автомобильных сетей
| Класс сети | Скорость передачи | Область применения данных |
| A | 10 кбит/с | Системы комфорта |
| B | 10-125 кбит/с | Самодиагностика |
| C | 125 кбит/с–1 Мбит/с | Системы управления двигателем, тормозами, коробкой передач, АБС и т.д. |
Автомобильные системы, независимо от их класса, могут выполняться (и выполняются) по одной из трех топологических схем сетей: «звезда», «кольцо» и «шина» (рисунок 2.4а).
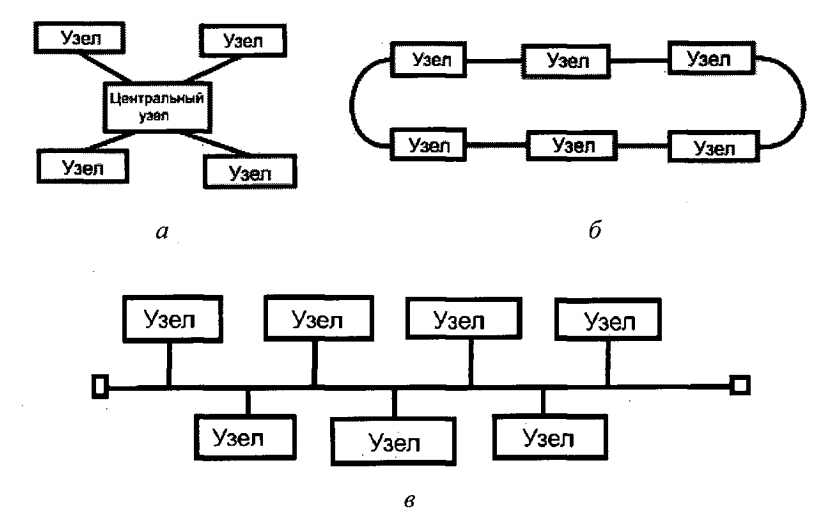
Рисунок 2.4а – Топологические схемы автомобильных мультиплексных систем: а – звезда; б – кольцо; в – шина.
В схеме «кольцо» все устройства равноправны, так как последовательно объединены в кольцо. Значит, передаваемые сигналы должны проходить по нескольким звеньям, этим обусловлены и недостатки схемы: потеря работоспособности при разрыве цепи или выходе из строя одного устройства; большая задержка и ее увеличение при добавлении нового звена.
Схема «шина» позволяет устройствам функционировать в общей среде передачи данных, используя широковещательную передачу; не требует доработок при подключении дополнительных устройств; в ней возможна реализация любого типа доступа к среде передачи данных, а время их передачи невелико. Самая важная задача протокола здесь – решение вопросов доступа в среду передачи данных.
Очевидно, что для автомобиля предпочтительнее именно эта схема: она экономит провода, обеспечивает высокую надежность системы управления.
Схема «шина» реализует доступ трех типов: основной узел по определенным правилам опрашивает дочерние узлы; получив от синхронизирующего пакета сигнал, отправляет данные тому дочернему узлу, который соответствует полученному от пакета сигналу; получив сигнал от дочернего узла, открывает последнему доступ в сеть. Первые два типа доступа называются централизованными, третий – децентрализованным. Он особенно эффективен, так как не тратит время на «холостые» опросы, т.е. обеспечивает мгновенное реагирование на высокоприоритетное сообщение.
Протокол CAN был разработан инженерами фирмы R. BoschGmbH для применения на автомобилях. Протокол соответствует международным стандартам ISO 11898 и ISO 11519 и используется несколькими производителями электронного оборудования. Протокол CAN признан автомобильными производителями США и Европы, применяется на современных легковых автомобилях, грузовиках, автобусах, сельскохозяйственном транспорте, в морском оборудовании, для автоматизации производства.
Протокол CAN поддерживает метод доступа CSMA/CD-A к сети с равноранговыми узлами. Пакет данных имеет размер не более 8 байт и передается по последовательной шине, 15-битовый циклический контроль избыточности обеспечивает высокий уровень целостности данных. Каждый узел состоит из двух составляющих. Это собственно CAN-контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU) (рисунок 2.4б).
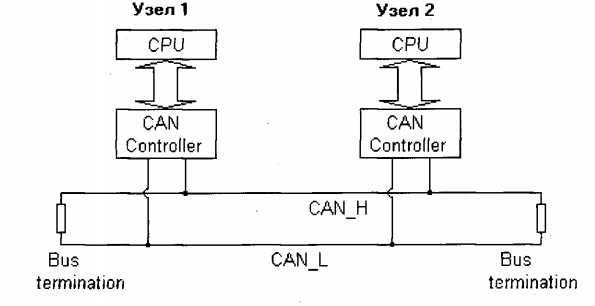 Рисунок. 2.4б – Структура сети CAN.
Рисунок. 2.4б – Структура сети CAN.
На рисунке 2.4впредставлена схема включения и битовые уровни протокола CAN в соответствии с международным стандартом ISO 11898, на рисунке 2.4г – в соответствии с международным стандартом ISO 11519.
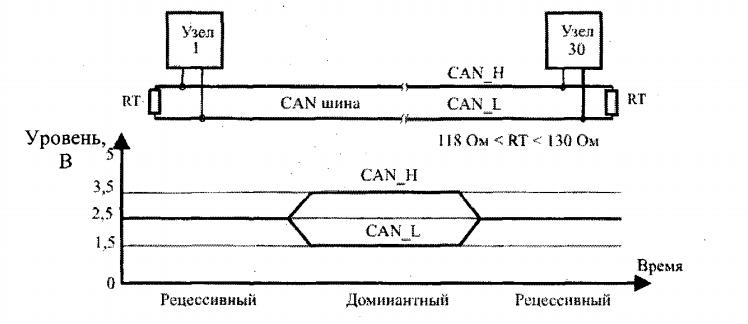
Рисунок 2.4в–Схема включения и битовые уровни по ISO 11898.
 Рисунок 2.4г – Схема включения и битовые уровни по ISO 11519.
Рисунок 2.4г – Схема включения и битовые уровни по ISO 11519.
— контроллеры v2.0A. Поддерживают только стандартный фор мат, не могут работать в сети, где передаются кадры расширенного формата;
— контроллеры v2.0B, пассивные. Поддерживают только стандартный формат, но могут работать в сети, где передаются и кадры расширенного формата;
— контроллеры v2.0B, активные. Поддерживают операции с кадрами стандартного и расширенного форматов.
Контроллеры CAN классифицируются также на полные и базовые в зависимости от организации буферизации данных.
Полный CAN-контроллер имеет некоторое количество (обычно 14) специализированных буферов для временного хранения сообщений. При инициализации CAN-контроллера можно сконфигурировать его, указав, какой кадр будет поступать в какой буфер.
Большинство европейских автомобилестроительных фирм в системах управления двигателем, безопасности и обеспечения ком форта применяют сетевой протокол CAN. Причем в ближайшие годы, как ожидается, на базе данного протокола будет введен единый интерфейс и для систем компьютерной диагностики. Таким образом, на каждом западноевропейском автомобиле в скором времени будет по крайней мере один узел данной сети. И это вполне объяснимо. Протокол CAN обладает важнейшим достоинством: идентификаторы сообщений используются не только для алгоритма разрешений коллизий, но и для описания сообщений, когда применяется не прямая адресация данных, а лишь отмечается характер информации, представленной в сообщении (например, «давление масла»). Поэтому большинство автомобилестроителей выбрали этот протокол для построения сетей именно класса С.
Физически CAN представляет собой последовательную асинхронную шину, данные которой передаются или по витой паре, или по оптоволокну, или по радиоканалу. Шинoй могут управлять сразу несколько устройств. Теоретически число подсоединяемых к ней устройств не ограничено. Скорость передачи данных задается программно (не более 1 Мбит/с).
Существуют также узлы, которые поддерживают обмен данными с использованием только 11-битного идентификатора, а при обнаружении в сети данных с 29-битным идентификатором выдают ошибку. Но на автомобилях устанавливают, естественно, только согласованные системы. Они работают в двух сетях, имеющих разные (250 и 125 кбит/с) скорости передачи данных. Первыеобслуживают основные системы управления (двигатель, автоматическая коробка передач, АБС и т.д.), вторые – вспомогательные (стеклоподъемники, освещение и пр.).
Поле арбитража CAN-кадра (поле идентификатора сообщений) используется в CAN для разрешения коллизий доступа к шине методом недеструктивного арбитража.
Суть метода недеструктивного арбитража заключается в следующем (рисунок 2.4д): в случае, когда несколько контроллеров начинают одновременную передачу CAN–кадра в сеть, каждый из них сравнивает бит, который собирается передать на шину, с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера пере дают следующий бит, и так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал), будет продолжать передачу, а другой (другие) контроллер прервет свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента ее освобождения.
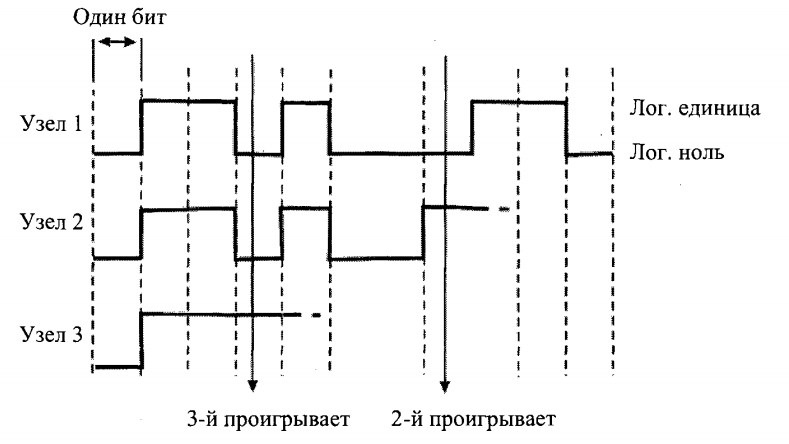
Рисунок. 2.4д – Побитовый арбитраж на шине CAN.
Над ним работали DaimlerChrysler, BritishAeropac, FIAT, Ford, Marelli, Bosch, Volvo и Венский технический университет. Разработанная архитектура ТТА признана эффективной для критичных по безопасности систем (автомобильных, железнодорожных, авиационных).
Архитектуры систем на основе протоколов ТТР и CAN в целом сходны. Обе системы подразделяются на ряд подсистем (кластеров, т.е. распределенных компьютерных систем), и наборы узлов, объединенных последовательным каналом. Для выполнения функций, которые невозможно реализовать на одном узле (таких как точная координация работы двигателя, тормозов и др.), узлы обмениваются сообщениями через последовательный коммуникационный канал. Каждый узел, в свою очередь, состоит из трех элементов: компьютера, коммуникационного контроллера и подсистемы ввода-вывода для связи с датчиками и элементами управления. Все эти элементы связаны между собой двумя интерфейсами: коммуникационным интерфейсом сети (CNI) между компьютером и коммуникационным контроллером и управляемым интерфейсом объекта (COI) между компьютером и подсистемой ввода-вывода процесса.
На рисунке 2.4е схематично показано подключение линейного драйвера коммуникационного контроллера к скоростной шине.
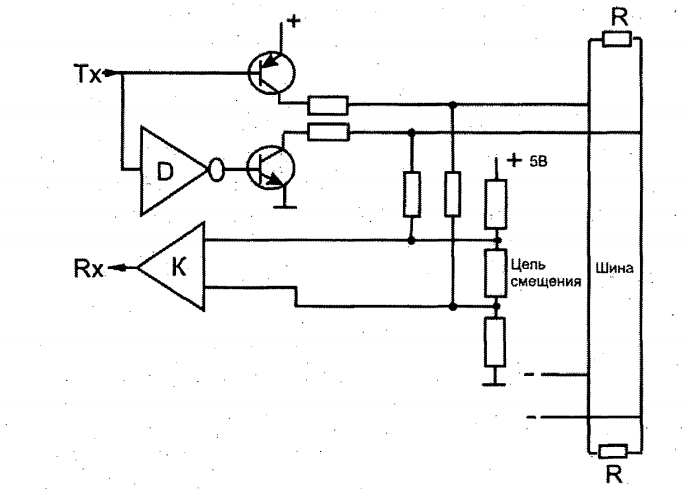
Рисунок 2.4е – Подключение драйвера к шине.
При подаче сигнала «О» на вход Тх оба транзистора отпираются, дифференциальное напряжение становится около 2,5 В, шина переходит в состояние доминирующего уровня.
Наличие цепи смещающего напряжения гарантирует смену полярностей сигналов на входах компаратора «К» при переходе шины от одного состояния к другому.
Компьютер узла содержит центральный процессор управления (ЦПУ), память, часы реального времени и собственную операционную систему, а также прикладное программное обеспечение. Он принимает и передает данные от и в CNI и COI, исполняет приложения реального времени в заданные временные интервалы.
Коммуникационный контроллер в случае протокола ТТР образован коммуникационным каналом и совокупностью управляемых временем коммуникационных контроллеров кластера, каждый из которых держит в памяти диспетчер-таблицу, определяющую в какую точку данное сообщение послано или в какой точке ожидается его получение. Коммуникационный контроллер CAN, управляемый событиями, такой таблицы не имеет, поскольку передача сообщения инициируется командой с компьютера узла.
Назначение коммуникационной системы – передавать (в масштабе реального времени) сообщения либо о значении параметра (переменной состояния, например скорости), либо о возникновении события от узла-передатчика одному или нескольким узлам- приемникам этого кластера. Сообщение состоит из трех частей: имени переменной состояния или события; наблюдаемого значения переменной состояния; времени наблюдения за переменной состояния или события. Ключевое место в нем занимает значение переменной состояния или события. Причем сообщение может не содержать значения времени, и тогда это значение принимается по факту приема сообщения.
Как видим, протоколы CAN и ТТЛ базируются на понятиях «событие» и «состояние». Но следует иметь в виду, что в ряде случаев информацию о новом состоянии можно упаковывать в со общение о событии, которое посылается только при изменении состояния.
Итак, протокол CAN есть коммуникационная система, управляемая сообщениями, которые посылаются, если компьютер узла запрашивает передачу сообщения и канал не занят. Но если другие узлы в данный конкретный момент времени тоже хотят послать сообщение, то посылается сообщение с наибольшим приоритетом.
Протокол ТТР – система, управляемая временем. Доступ к физической среде управляется бесконфликтной стратегией TDMA (разделенный во времени множественный доступ). Каждый узел получает уникальный временной слот в цикле TDMA. Каждый контроллер ТТР содержит таблицу диспетчеризации (список дескрипторов сообщений, MEDI) с информацией о том, какой узел имеет право послать и какое сообщение в конкретный момент времени, два дублированных канала коммуникации (для того,что бы не допустить возможную потерю информации).
Система, основанная на протоколе ТТР, обладает большой величиной возможного потока данных (до 4 Мбит/с), надежностью (за счет дублирования коммуникационного канала) и строгим регламентом работы во времени, который позволяет заранее определить свойства системы. Вероятно, что будущее именно за данной системой: она, как предполагается, будет управлять всеми жизненными функциями автомобилей (электронным рулем, акселератором, тормозами и другими высокоприоритетными устройства ми). Это особенно актуально в свете того, что на протяжении последних лет демонстрируются многочисленные концептуальные автомобили и даже ходовые макеты, которые не имеют механических связей между органами управления и исполнительными механизмами. Однако на современном этапе развития возможен только частичный мультиплекс, когда сетевая схема состоит из набора элементов, включающих датчики и устройства, подключенные к распределительному устройству посредством проводов[4].
Дата добавления: 2018-05-12 ; просмотров: 2386 ; Мы поможем в написании вашей работы!



